驾驶模拟器用几自由度,不能只按“自由度越多越好”判断。只做基础姿态演示、轻量体验或简单教学时,三自由度可能已经够用;如果项目需要同时模拟加减速、制动、转向侧倾、路面起伏、横移纵移,并和视景系统、车辆模型或实验数据同步,通常要评估六自由度运动平台。
一、几自由度没有固定答案
驾驶模拟器选运动平台,先要分清项目到底在模拟什么。很多需求一开始会写成“做一个汽车驾驶模拟器”,但背后的目标可能完全不同:有的是展厅体验,有的是高校课程,有的是驾驶行为研究,有的是自动驾驶算法验证,还有的是赛车或特种车辆训练。目标不同,需要的自由度也不同。
落到工程上:只要基础动感(上下、俯仰、侧倾),三自由度在成本和维护上更轻;要把加速、制动、转向、颠簸、姿态和视景同步组合在一起,六自由度才有足够的运动空间留给体感算法、车辆模型和实验脚本。

这里的关键不是“多几个轴”,而是项目是否需要复现多方向耦合。真实驾驶里的体感很少只来自一个方向:制动会带来俯仰,加速会带来后仰,转向会有侧倾和横向线索,路面起伏又会叠加升降和姿态变化。平台自由度越少,能表达的线索越有限;平台自由度越多,系统集成和控制边界也更需要提前定义。
二、驾驶体感主要来自哪些线索
驾驶模拟器不是简单把车放到一个能动的平台上。真正影响体验和试验价值的,是运动平台、视景、声音、方向盘踏板、车辆模型和安全边界共同形成的体感线索。运动平台只负责其中一部分,但这一部分如果选错,后面很难靠软件完全补回来。
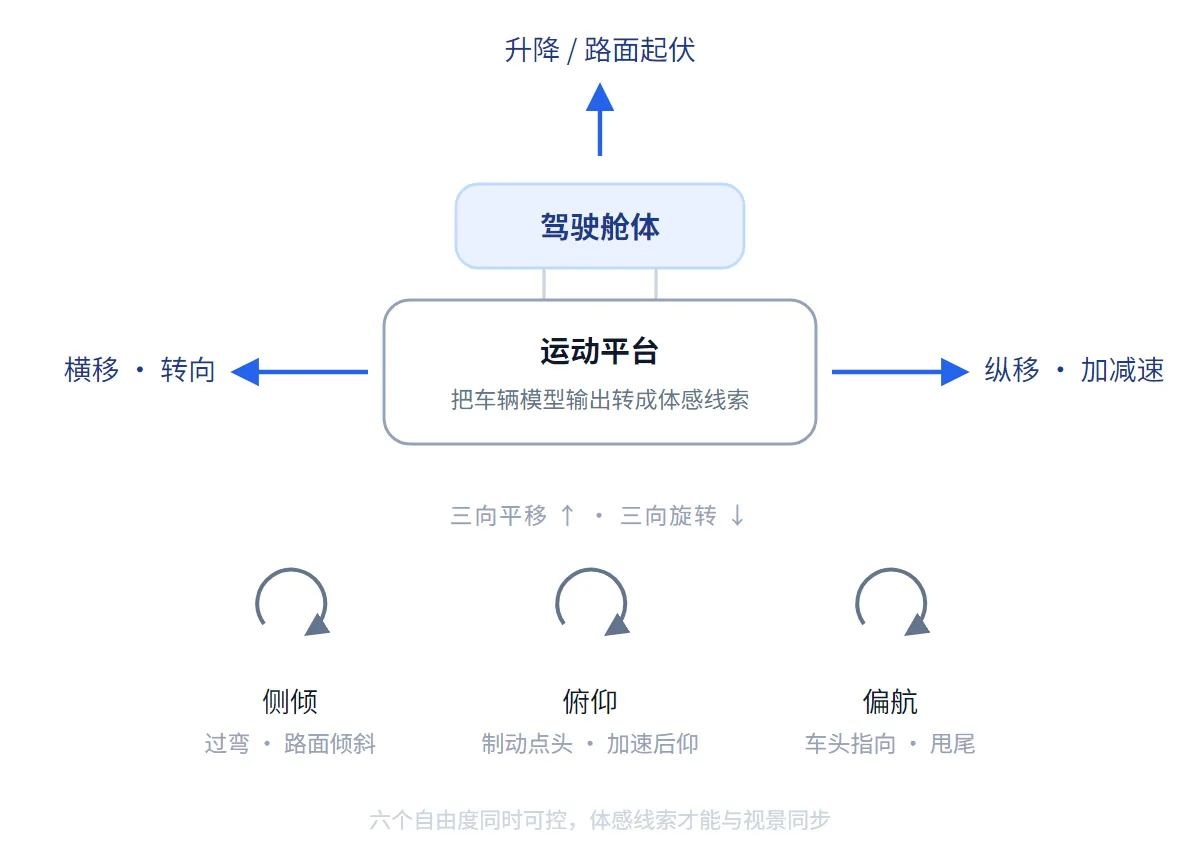
可以把驾驶体感拆成几类线索:
| 体感线索 | 常见来源 | 对自由度的影响 |
|---|---|---|
| 纵向加减速 | 起步、加速、制动 | 需要俯仰和纵向线索配合 |
| 横向转向 | 转弯、变道、避障 | 需要侧倾、横向线索和视景同步 |
| 垂向路面起伏 | 坑洼、减速带、道路谱 | 需要升降和姿态组合 |
| 偏航方向 | 车辆朝向、漂移、特种车辆姿态 | 需要偏航或与视景做合理映射 |
| 可重复试验 | 教学、科研、人因实验 | 需要脚本、接口和记录能力 |
三自由度方案能覆盖一部分基础体感,但表达空间有限。六自由度方案的优势,是能把多个方向组合起来,让同一个驾驶事件有更完整的运动响应。例如一次制动,不只是“台面往前倾”,还可以结合纵向线索、座舱重心、视景减速和踏板反馈,让动作更接近驾驶任务本身。
当然,自由度增加也不是白来的。六自由度平台需要更清楚的舱体载荷、重心、运动范围、接口协议和安全限位。项目如果没有视景同步、没有车辆模型、也不需要记录实验数据,盲目上六自由度可能只是把系统复杂度提高了。
三、平台怎么让人感觉一直在加速
一个常见疑问:六自由度平台的平移行程通常只有零点几米,凭什么模拟一脚油门踩下去那种持续好几秒的加速感?
答案不在平台能跑多远,而在人的前庭感知特性。人对运动的感知主要靠内耳前庭:耳石器感知线性加速度,半规管感知旋转速度,两者都有感知阈值——低于阈值的运动,人察觉不到。驾驶模拟正是利用这一点做倾斜协调(tilt coordination):平台以低于半规管阈值的速度缓慢后仰,把重力的一个分量投影到人的躯干纵向,配合视景里持续后退的画面,前庭和视觉共同把它解读成“车还在加速”。工程上常用的倾斜速率参考阈值约 3°/s(Groen 等人针对自运动模拟的前庭实验结果)——低于它,人感觉到的是加速,而不是“座椅被抬起来”。
模拟持续加速度靠的不是平移行程,而是低于前庭感知阈值(约 3°/s)的缓慢倾斜——重力分量冒充纵向加速度,视景补齐其余。
瞬时线索则走另一条路:起步冲击、换挡顿挫、压过减速带这类高频运动,由平台的平移和快速姿态变化直接给出;动作给完后,平台再以低于感知阈值的速度悄悄回到中位,把行程腾出来等下一个动作。这套“高频靠平移、低频靠倾斜、事后洗出回中”的组合,就是运动提示算法(motion cueing)的基本框架。
这层机理解释了两件事。其一,为什么只有俯仰、侧倾、升降的三自由度平台也能提供一部分加速感——它做得了倾斜协调,但缺横移、纵移和偏航,瞬时线索和复合工况表达不完整。其二,为什么六自由度被当作训练级驾驶模拟的基本骨架——六个方向齐了,倾斜协调、瞬时平移线索和洗出回中才能同时成立。
四、三自由度适合什么项目
三自由度驾驶模拟器适合目标比较明确、体感线索不复杂的项目。比如教学演示、轻量驾驶体验、部分文旅互动、简单姿态训练,客户更关注“能动起来、维护方便、预算可控”,而不是完整复现车辆动力学。
这类项目通常可以优先关注三件事:舱体是否够轻、动作是否安全、内容是否同步。平台自由度少,控制和维护会更简单,但也要接受它对体感表达的限制。比如它可以做明显的俯仰和侧倾,却很难同时表达横向位移、纵向位移和偏航方向上的复合线索。
适合先按三自由度评估的项目,大致有这些特征:
- 主要目标是体验、展示或基础教学,不需要严肃的实验数据记录;
- 体感内容以俯仰、侧倾、升降为主,不要求复杂车辆动力学;
- 舱体较轻,现场空间和维护条件有限;
- 更看重成本、可靠性和运营便利性;
- 验收方式以动作演示和内容同步为主。
如果项目目标在这些范围内,三自由度方案并不低级。它是一个更轻的工程选择。真正要避免的是:明明项目需要做车辆行为研究、自动驾驶测试或训练级驾驶舱,却为了前期省成本选了过少自由度,后续再用软件硬补体感线索。
五、六自由度适合什么项目
六自由度驾驶模拟器适合多方向体感、可重复实验和开放接口更重要的项目。它通常不是为了“看起来更高级”,而是为了让驾驶事件能被拆成可控制、可同步、可记录的运动输入。
例如高校车辆工程实验室、自动驾驶研究、人因工程、特种车辆驾驶训练、赛车或商用车训练项目,往往会同时关心舱体载荷、运动脚本、视景同步、方向盘踏板反馈、上位机接口和安全边界。此时平台自由度只是基础,真正的项目难点在系统集成。
适合优先评估六自由度的项目,通常有这些特征:
| 判断问题 | 如果答案是“是” | 选型倾向 |
|---|---|---|
| 是否要复现加速、制动、转向和路面起伏的组合体感? | 体感线索多方向耦合 | 优先评估六自由度 |
| 是否要和车辆模型、视景系统或数据采集同步? | 平台不是孤立运行 | 优先评估开放接口方案 |
| 是否要重复同一工况用于教学或实验? | 需要脚本、记录和复现 | 优先评估六自由度 |
| 舱体是否有座椅、方向盘、踏板、屏幕等完整负载? | 载荷和重心会明显影响平台 | 需要工程核算 |
| 是否有明确安全限位和验收脚本? | 项目进入工程交付阶段 | 适合做系统方案 |
训练级驾驶模拟器的天花板,也是同一个思路的延伸。美国国家先进驾驶模拟器 NADS-1(爱荷华大学)就是这么做的:在六自由度 hexapod 之外,再叠加 ±10 m 的 X-Y 平移轨道和一个 330° 偏航环,组成 13 自由度系统,运动系统由 MTS 制造。它扩展的是行程和偏航范围——核心的承载与姿态控制,仍然落在那台六自由度并联平台上。当项目对体感真实性的要求往上走,行业的做法是在六自由度基础上加行程,而不是绕开它。
彦控车辆驾驶模拟方案通常从 YK6-S / YK6-M 起步评估,具体取决于舱体重量、重心高度、座椅数量、视景方案和现场条件。页面上的产品型号只是沟通入口,最终仍要按项目技术协议确认。
六、不要把“自由度”当成唯一指标
驾驶模拟器怎么选,不能只盯着三自由度还是六自由度。自由度解决的是“能表达哪些运动方向”,但一套系统好不好用,还取决于载荷、重心、控制接口、视景同步、安全限位和验收方式。
同样是六自由度平台,轻型单座驾驶舱和双座研发舱体的选型完全不同。前者可能更关心空间占用、维护便利和互动体验;后者可能更关心载荷重心、接口刷新、视景联动和实验复现。只问“能不能六自由度”,还不如先问“我的项目要验证什么”。
前期建议把需求整理成下面这张清单:
| 需要确认 | 具体写法 |
|---|---|
| 项目目标 | 教学、体验、训练、人因研究、自动驾驶测试、车辆工程实验 |
| 舱体负载 | 座椅、方向盘、踏板、屏幕、外壳、人员和附加设备 |
| 重心与偏载 | 座舱重心高度、是否单侧偏重、是否后续加装设备 |
| 体感目标 | 加减速、制动、转向、路面起伏、姿态演示分别要到什么程度 |
| 视景系统 | 投影、屏幕、头显、环幕或客户已有视景方案 |
| 软件接口 | Matlab、ROS、Unity、Unreal、车辆模型或自研上位机 |
| 安全边界 | 急停、限位、围挡、调试流程和人员动线 |
| 验收脚本 | 用哪些典型工况证明系统符合需求 |
这张清单比一句“要六自由度”更有价值。它能帮助工程师判断是否需要六自由度,应该从哪个平台型号起步,哪些内容由彦控集成,哪些内容由客户或第三方系统提供。
七、先分体验型还是实验型
如果还拿不准,可以先把项目分成体验型和实验型。
体验型驾驶模拟器更关心沉浸感、内容同步、安全运营和维护便利。它可以使用六自由度,也可以使用三自由度;关键是内容、视景和动作是否匹配。如果预算和空间有限,三自由度并不一定差。
实验型驾驶模拟器更关心可重复、可记录、可接入和可验收。它要把车辆模型、驾驶输入、平台位姿、视景状态和实验数据放在同一套流程里看。这个时候,六自由度平台更像一个可控运动执行系统,而不是单纯的动感座椅。
因此,判断逻辑可以简化成一句话:
如果项目主要让人“感受到动”,先看三自由度是否够用;如果项目要把驾驶工况“复现、记录、比较和验证”,就应该优先评估六自由度平台和开放接口。
这个判断不替代工程选型,但能帮早期沟通少走弯路。
延伸阅读
- 需要完整方案边界?看 车辆驾驶模拟系统方案
- 需要通用平台选型?看 六自由度平台选型指南
- 想了解运动平台原理?看 六自由度运动平台原理详解
- 产品入口:YK6-S 轻型六自由度平台 · YK6-M 中型六自由度平台
参考资料
- Groen, E. L. & Bles, W., How to use body tilt for the simulation of linear self motion, Journal of Vestibular Research, 2004
- Development and Evaluation of a Threshold-Based Motion Cueing Algorithm, Vehicles (MDPI), 2021
- Motion Cueing Algorithms for a Real-Time Automobile Driving Simulator, DLR (German Aerospace Center)
- Unique Features and Capabilities of the NADS Motion System, SAE Technical Paper 2001-06-0246
- NADS-1 Simulator, University of Iowa Driving Safety Research Institute