无锡彦控智能科技有限公司
研发与制造电动伺服六自由度并联运动平台,也可按项目提供三自由度平台与非标运动仿真系统。机械结构、嵌入式控制器、上位机软件和现场联调由同一支团队完成。
把真实世界的运动 — 复现到实验室里。
从驾驶、飞行到船舶与振动,把真实工况变成可控、可重复、可测量的平台运动——这是彦控每个项目的出发点,也是整机交付的标准。
一支专注运动控制的工程团队
从机构选型、运动算法、实时控制到上位机软件,整条工程链不外包。
彦控研发与制造六自由度并联运动平台,覆盖模拟训练、振动与测试验证、波浪补偿与主动稳定、文旅动感、教学科研等应用方向。核心元器件采用品牌伺服与进口丝杆导轨,并按项目约定提供远程协助、现场调试和系统升级支持。
- 主营
- 六自由度并联运动平台 · 研发与制造
- 规模
- 单机 50 kg–10 t(大负载定制至 15 t);多机同步组阵 40 t 级
- 应用
- 模拟训练、振动与测试验证、波浪补偿与主动稳定、文旅动感、教学科研
- 自研
- 机械结构 · 嵌入式控制器 · 上位机软件与 SDK
- 选材
- 品牌伺服 + 进口丝杆导轨
- 所在地
- 江苏无锡 · 新吴区
工厂实景
从机械加工、整机装配到出厂测试,都在自有工厂完成。
工程能力
6 个方向的完整工程链条 — 设计、控制、软件、集成、运维。
并联机构设计
机构反解、刚度优化、关节与驱动选型,覆盖 50 KG 到 10 吨。
运动学与动力学
围绕载荷、姿态、行程与现场边界做整机运动方案配置。
控制系统集成
自研嵌入式控制器与上位机软件协同,支持整机状态管理。
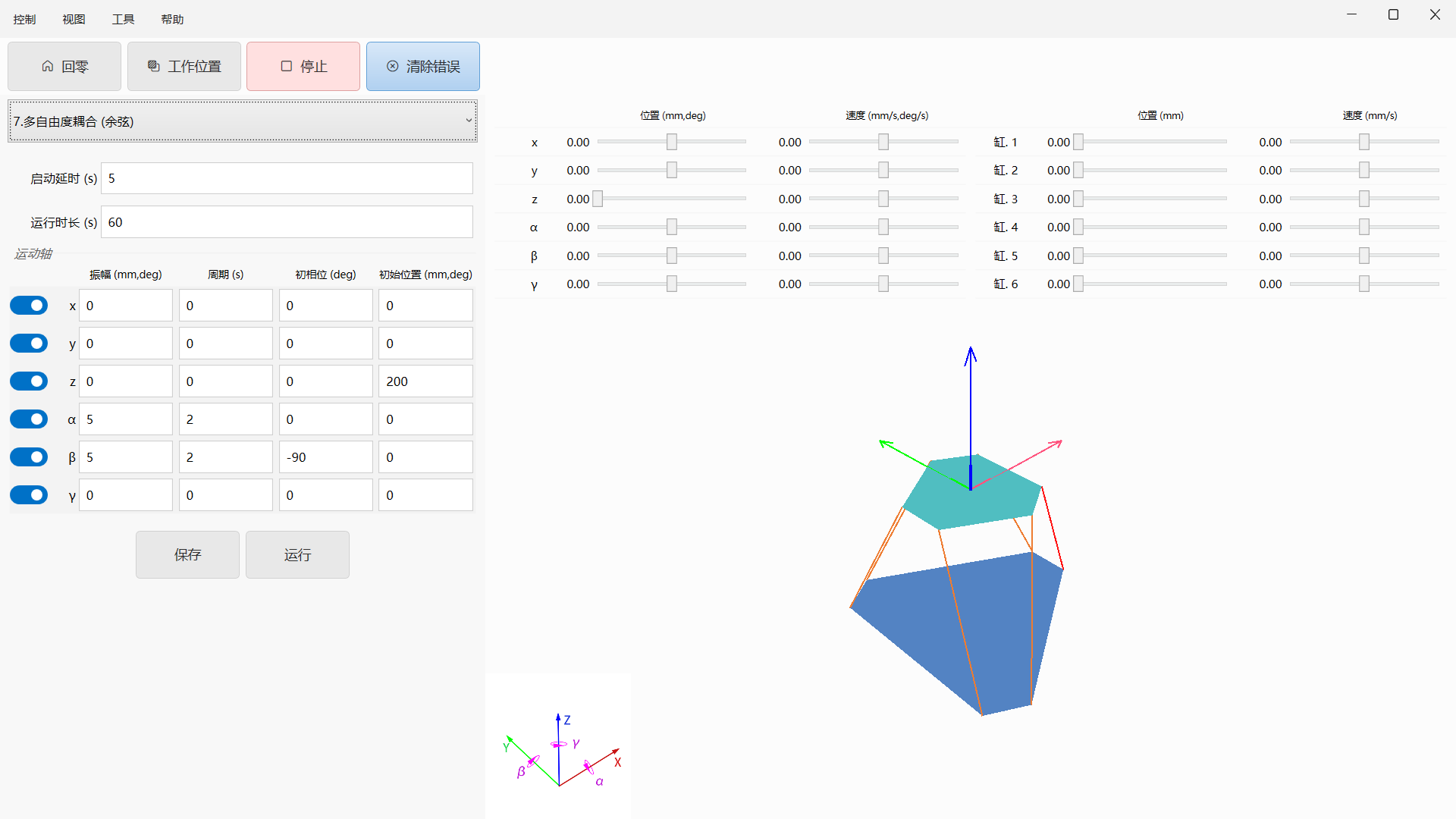
上位机与 SDK
跨平台上位机软件与多语言 SDK,对接 PLC、HIL、ROS、Unity 等。
整机交付
机柜、舱体、电气与运动控制由同一团队交付,含安装调试。
交付后支持
按项目约定提供远程协助、现场调试、维护建议与版本升级。
研发深度
上面是能交付什么;这里是哪些由彦控自研 — 硬件、控制、软件三层自上而下打通,平台长期可维护、可升级。
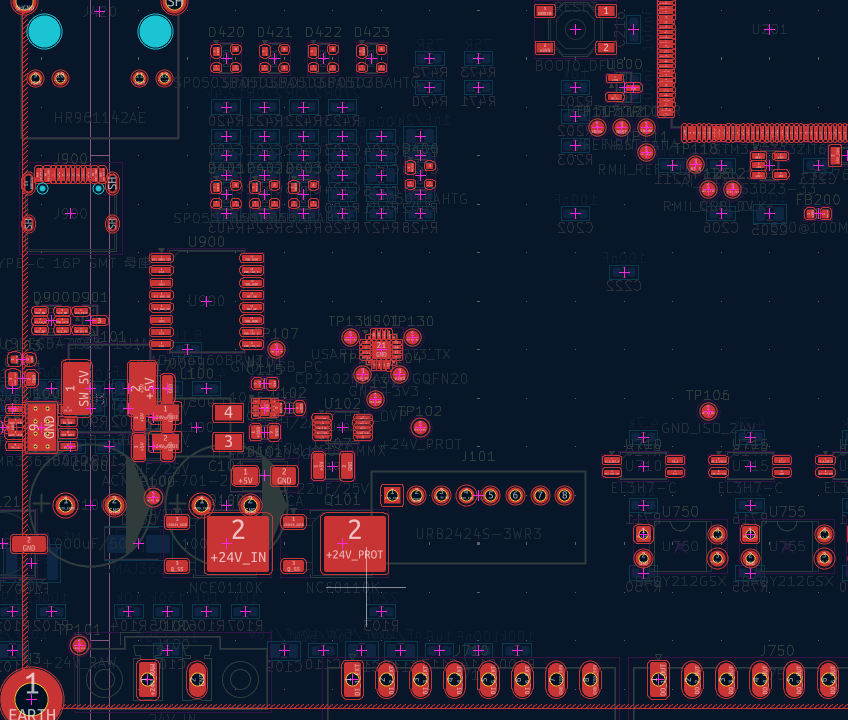
硬件
嵌入式主控板自研设计、制造与长期维护,面向多自由度平台的实时运动控制与状态管理。
控制
回零、标定、限位与整机状态机(初始化、就绪、运动、停止、故障、急停)按项目配置,安全边界由控制器本地判断。
软件
跨平台 yksw 上位机与多语言 SDK,开放 TCP / UDP / WebSocket / HTTP 四类应用层协议,跨语言、跨平台。
服务的客户
高校 · 科研 · 能源 · 文旅 · 振动测试
以上为部分代表性客户,按公开信息整理;具体合作项目以双方约定为准。
关于彦控 · 常见问题
客户常问到的几个问题;如还有其他疑问,可直接联系工程师。