天线测试摇摆平台是让车载、船载、机载天线在受控姿态扰动下接受测试的运动设备,多为三自由度或六自由度摇摆台。它回答的问题和暗室里的方位/俯仰转台不同:转台测的是天线”站着不动时性能好不好”,摇摆台测的是天线”在载体摇晃时还能不能锁住目标”。对动中通、卫星通信、雷达和导航天线,后一个问题直接对应监管指标和实际可用性。
一、天线为什么要在摇着的状态下测
装在车顶、船桅、机身上的天线,工作环境不是实验室的静止台面。车辆过弯、船舶横摇、飞行器机动时,天线波束要在载体不断变化的姿态下保持对准目标——卫星、基站或跟踪对象。波束越窄,这件事越难:高频段动中通天线的半功率波束宽度只有几度甚至不到一度,载体一个正常的横摇动作就足以把波束甩出目标。
这不只是性能问题,还是合规问题。卫星通信里失指向的天线会把能量发到邻星轨位上去,干扰别人的链路,所以监管给出了明确的量化边界。
按 GVF 与 FCC 对动中通终端的要求,失指向超过 0.5° 时必须在 100 毫秒内静默发射,指向误差回到 0.2° 以内才允许恢复发射。
0.5°、100 毫秒——这样的指标没法靠静态测试验证。天线的跟踪回路、稳定机构、失锁判断逻辑,只有在受控、可重复的姿态扰动下才能被考核。这就是摇摆平台在天线测试体系里的位置。
二、转台测方向图,摇摆台测跟踪
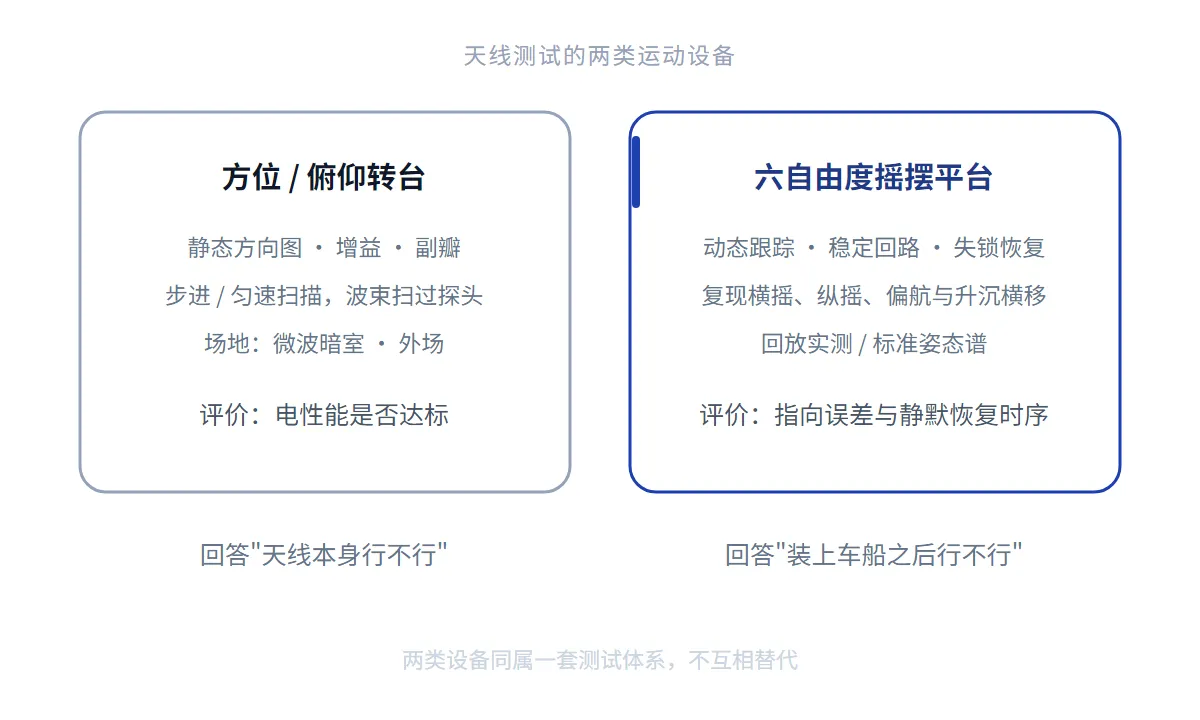
天线测试里有两类”会动的设备”,经常被混为一谈,分工其实很清楚:
| 维度 | 方位/俯仰转台 | 六自由度摇摆平台 |
|---|---|---|
| 测什么 | 静态方向图、增益、副瓣等电性能 | 动态跟踪、稳定回路、失锁与恢复 |
| 怎么动 | 精确步进或匀速扫描,转天线让波束扫过测量探头 | 复现载体姿态谱:横摇、纵摇、偏航乃至升沉横移 |
| 场地 | 微波暗室或外场测试场 | 暗室、外场或工厂联调现场 |
| 评价 | 电性能指标是否达标 | 姿态扰动下的指向误差、静默/恢复时序 |
一句话分工:转台回答”天线本身行不行”,摇摆台回答”天线装上车船之后行不行”。两类设备不互相替代——方向图不达标的天线上摇摆台没有意义,方向图漂亮但跟踪回路失效的天线照样不能交付。
三、相位中心不是一个点
天线的相位中心常被当成一个固定的几何点,实际上它随频率、方位角和俯仰角漂移,专业上分为相位中心偏移(PCO)与相位中心变化(PCV)。对测向、干涉测量和高精度导航天线,这个漂移直接进入误差预算——姿态一变,相位中心跟着变,测量基准就动了。
国际上怎么量化这件事很说明问题:GNSS 高精度天线的绝对场标定,就是用六轴机器人抓着天线连续改变倾角和转角,在真实卫星信号下把相位中心随姿态的变化逐点测出来。德国 Geo++ 与汉诺威大学建立的这套机器人标定方法,相位中心模型的重复性达到亚毫米级。
高精度天线的相位中心标定,国际通行做法就是用多轴运动系统”摇”着天线测——姿态与相位中心的耦合是可量化的物理事实,不是营销话术。
对天线制造和测试企业,这意味着摇摆平台除了考核跟踪回路,还承担相位中心稳定性验证的角色:让天线在标定过的姿态序列下工作,把”姿态-相位”耦合从未知变成数据。这类测试对平台本身的位姿精度和运动平顺性有要求——平台自己的姿态误差要显著小于被测量的效应。
四、国际测试体系怎么做动态验证
动中通天线的型号认可测试是观察这套方法论的好窗口。全球只有两个具备全要素能力的动中通测试场:美国 Aberdeen 试验场和德国 Fraunhofer IIS 与伊尔梅瑙工业大学共建的 FORTE 测试设施。FORTE 的做法是:50 米天线塔提供真实的 Ku/Ka 波段星地链路,被测终端装在机电式运动模拟器上,按标准化的车辆/船舶姿态谱运动,同时测量跟踪精度与静默/恢复时序,依据 GVF 101/104/105 出具型号认可。
这套体系里有两个对国内采购有参考价值的做法:
- 姿态谱标准化。测试不是”随便摇一摇”,而是回放标准化的载体运动数据——不同等级道路的车辆姿态谱、不同海况的船舶运动谱——保证不同实验室的结果可比。
- 运动与射频同步采集。平台的姿态真值和天线的指向误差、链路指标同步记录,事后才能把”失锁发生在哪个姿态动作上”对应起来。
国内企业自建天线动态测试能力时,这两点直接决定摇摆平台的选型要求:平台要能回放实测或标准姿态谱(不只是正弦摇摆),控制系统要有开放接口把姿态数据实时交给测试系统。
五、摇摆平台怎么选
按顺序确认四件事:
- 载荷与重心——天线加座架、转接工装的总质量,以及重心高度。天线测试载荷的特点是”不重但高”,重心每抬高一段,平台的倾覆力矩和动态负载就上一个台阶,选型时按重心高度修正,不能只看吨位。
- 姿态谱——要复现哪种载体、什么工况:角度幅值、角速度、频率范围各是多少。对照实测数据或标准谱确定,避免”按最大参数买、按最小工况用”。
- 波形与接口——正弦扫频、谱文件驱动还是实测数据回放;姿态真值以什么接口、什么频率输出给射频测试系统。动态测试的价值一半在运动本身,一半在运动数据与射频数据能对上。
- 安装与现场——转接法兰、暗室尺寸与吊装通道、供电,以及是否需要在客户产线现场联调。
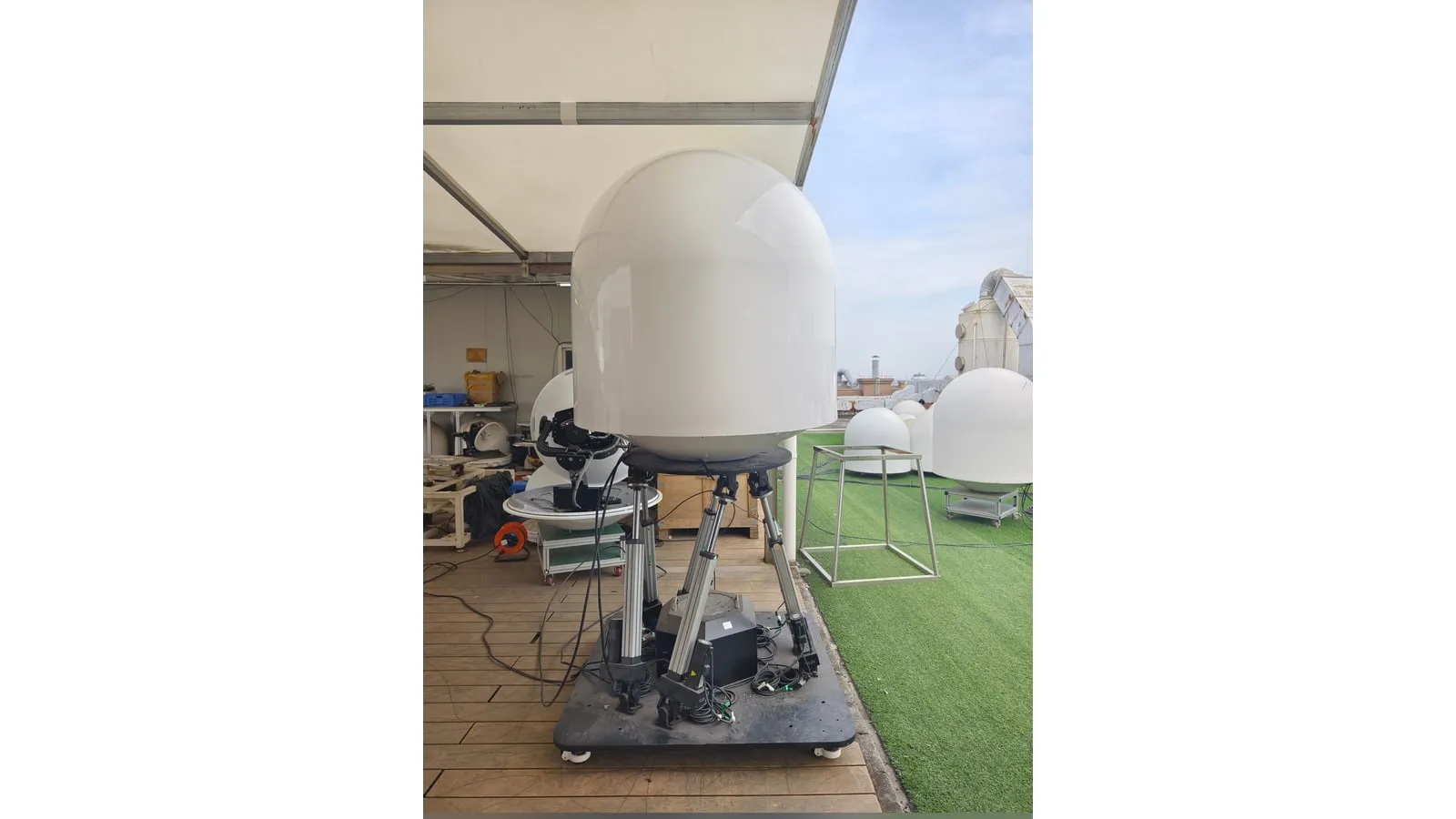
广州某天线测试设备企业的项目里,彦控交付的六自由度摇摆平台用于车载、船载、机载天线的姿态干扰测试与相位中心稳定性验证——平台按客户的天线座架定制转接,控制系统开放接口把实时位姿数据交给客户的测试软件同步采集。
类似场景的平台型号与配置边界,见天线雷达姿态测试方案页。
参考资料
- F. Alazab Elkhouly et al., Standardized Testing Conditions for Satellite Communications On-the-Move (SOTM) Terminals, International Journal of Satellite Communications and Networking, 2019
- Fraunhofer IIS, FORTE — Facility for Over-the-air Research and Testing, iis.fraunhofer.de
- Global VSAT Forum, GVF 105: Performance Verification of Comms-on-the-Move Mobile Satellite Communication Terminals
- G. Wübbena, M. Schmitz et al., Absolute GNSS Antenna Phase Center Calibration with a Robot, Geo++ GmbH / ION GNSS
- Institute of Geodesy, Leibniz University Hannover, Development of GNSS Antenna Calibration
- Calibration of a Six-Axis Robot for GNSS Antenna Phase Center Estimation, Journal of Surveying Engineering, Vol. 145, No. 4, 2019
- IEEE, IEEE Std 149-2021: Recommended Practice for Antenna Measurements
延伸阅读
- 天线雷达姿态测试方案 — 场景、型号与配置边界
- YK6-S 小型六自由度平台 — 天线姿态测试的常用起步型号
- 六自由度平台的应用场景 — 姿态测试在六大方向里的位置