波浪补偿登乘梯(行业里也叫动补舷梯、主动舷梯或 walk-to-work 系统)是在船舶与海上设施之间建立稳定通道的人员转运装备:船在浪里动,装在船上的运动平台实时反向抵消这些运动,让伸出去的桥头相对风机塔基近似静止,人员步行通过。它解决的是海上作业里最老也最贵的问题——人怎么安全地从会动的船,上到不动的塔。
一、海上换乘的瓶颈是最后三米
中国海上风电累计并网容量在 2024 年底达到 4127 万千瓦,约占全球一半,累计装机连续四年全球第一。机组越装越多、离岸越来越远,一个不起眼的环节开始决定运维成本:运维人员怎么上塔。
传统做法是运维小船(CTV)“顶靠直跳”——船艏顶住风机基础的靠船件,人抓住爬梯在船体起伏的间隙跳过去。这个动作对海况极其敏感:行业惯例的作业上限约为 1.5 米有效波高,浪再大,跳跃的时机窗口和坠落风险就不可接受了。
问题在于海不等人。风机故障不挑天气,深远海风场的海况又普遍比近海恶劣——每一个因为浪高超限而返航的日子,都是发电量损失加上白跑一趟的船费。换乘能力的上限,就这样变成了整个运维体系的瓶颈。
二、波浪补偿登乘梯把跳变成走
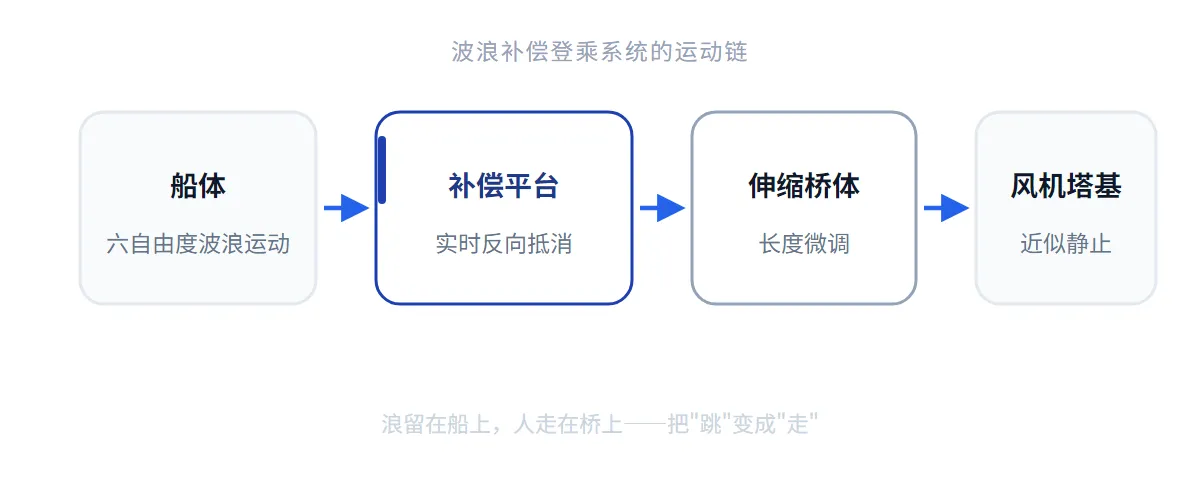
动补舷梯的思路是不让人去适应浪,而是把浪”抵消”掉。装备由三部分组成:底部的运动补偿平台、中段的伸缩桥体、顶端的对接缓冲机构。船体被波浪推着做六个自由度的运动,平台测量这些运动并实时反向动作,桥体随之伸缩微调——最终效果是桥头相对风机塔基近似静止,人员像过天桥一样走过去。
这个品类的国际标杆很能说明技术路线。荷兰 Ampelmann 的 A 型系统——全球海工登乘市场的代表产品,累计完成超过 1200 万人次转运——底座就是一台六自由度 Stewart 平台,六支液压缸同时补偿船体全部六个自由度的运动,可抵消 2.5 米的升沉,配合增强模式在 3.5 米有效波高下仍能安全转运。
全球登乘系统的标杆产品,底座就是一台六自由度 Stewart 平台——把船体六个自由度的波浪运动实时反向抵消,桥头才能”钉”在空中不动。
选六自由度构型不是偶然:学术界对这类装备的分析普遍指出,Stewart 并联结构的刚度重量比和位姿精度,是它在船载补偿场景胜出的原因。同样的构型,在彦控的产品线里对应风电运维主动登乘舷梯与六自由度海浪模拟系列。
三、可达性就是经济账
把直跳和动补舷梯放在同一片海域比较,差别不在”舒适”,在可作业天数:
| 转运方式 | 作业上限(有效波高) | 转运形态 | 适用阶段 |
|---|---|---|---|
| CTV 顶靠直跳 | 约 1.5 m | 抓梯跳跃,看浪的间隙 | 近海、轻量运维 |
| 波浪补偿登乘梯 | 3 m 以上(标杆系统达 3.5 m) | 步行通过,连续可控 | 深远海、批量运维 |
同一片海域的波浪统计里,有效波高 1.5-3 米之间的天数占比相当可观——这一段正是直跳去不了、动补舷梯可以去的窗口。对深远海风场,这往往意味着每年几十天的可达性差距,直接折算成故障响应速度和发电量。
有效波高 1.5 米到 3 米之间的海况天数,就是动补舷梯从日历上”抢回来”的作业窗口。
这也是为什么欧洲海上风电运维从 CTV 为主走向”服务运维母船(SOV)+ 动补舷梯”模式:人员住在船上,舷梯每天把技师直接送到塔基平台,运维从”抢天气”变成”排班表”。
四、认证与验收怎么看
人员转运装备的安全属性决定了它有独立的认证体系。DNV 于 2015 年 12 月推出 ST-0358《海上人员转运舷梯认证》,是这个品类接受度最高的专项标准;配套的 Walk2Work 船级符号则在船舶层面标注整船的登乘作业能力。国际项目招标中,认证等级是甲方比较装备能力的通用语言。
落到采购验收,认证框架背后是三件可核查的事:
- 补偿精度——给定海况谱下桥头残余运动多大,这决定转运的实际安全裕度。
- 失效模式——动力或传感失效时装备进入什么状态,人员在桥上如何撤离;这部分设计深度是专业装备和”能动的桥”的真正差别。
- 作业边界——标称的有效波高上限对应什么船型、什么浪向;同一台装备装在不同船上,边界并不一样。
五、国内项目怎么起步
国内深远海风场进入批量开发,登乘装备的需求随之从”进口整机”向”国产化研制”延伸。装备方起步时按顺序确认四件事:
- 船型运动谱——目标船在目标海域的六自由度运动统计,这是补偿系统所有指标的输入。
- 补偿自由度取舍——升沉主导的场景可从主动升沉补偿起步,横摇纵摇显著或对接窗口苛刻时评估六自由度全姿态补偿。
- 载荷与通行能力——桥体自重、人员流量、随行工具载荷,决定平台型号与驱动功率。
- 测试验证手段——装备下海之前,补偿算法和机构要在陆上把海况”演”出来验证。
第四件事常被低估:登乘系统的研发闭环里需要一台能复现海浪运动的平台,让补偿机构在受控、可重复的运动谱下调试。上海某头部风电能源企业的项目里,彦控交付的三自由度海浪模拟平台就用于海上风电设备的海浪环境模拟与运维设备验证——先在车间里过海况,再上船。

从海浪模拟到补偿执行,两端用的是同一套运动平台技术。相关场景与型号边界见波浪补偿与主动稳定方案页。
参考资料
- Ampelmann, A-type Motion Compensated Gangway System, ampelmann.nl
- Ampelmann System, Wikipedia
- DNV, A Safer Walk to Work — DNVGL-ST-0358 Certification of Offshore Gangways for Personnel Transfer, dnv.com
- American Clean Power Association, Offshore Marine Transfer Guidance, May 2023
- Simulation and Experimental Study of Vessel-Borne Active Motion Compensated Gangway for Offshore Wind Operation and Maintenance, Journal of Marine Science and Engineering, 2026
- Robust Wave Compensation Controller Design for an Active Hexapod Platform with Time-Varying Input Delays, Ocean Engineering, 2023
- 人民日报,《我国海上风电持续迅猛发展》,2024-12
- 全球风能理事会(GWEC),《海上风电回顾与展望》
延伸阅读
- 升沉补偿与波浪补偿 — 补偿的机理、主被动与参照系
- 风电运维主动登乘舷梯 — 彦控登乘装备产品页
- 波浪补偿与主动稳定方案 — 方向全景与型号边界