一、什么是六自由度运动平台
六自由度运动平台,是用 6 支可独立伸缩的支链并联驱动一个动平台,让它同时完成位置和姿态控制的运动机构。它能控制 3 个平移方向和 3 个旋转方向,所以适合复现车辆、飞机、船舶、振动试验和沉浸式体验中那种“多个方向同时变化”的运动。
更严谨的名称是 Gough-Stewart 平台。Stewart 1965 年发表的论文让这种机构进入飞行模拟领域,但更早的 Gough 轮胎测试机已经把“6 支支链并联承载一个平台”的思路用于复合载荷试验。也就是说,它不是先从娱乐体感设备发展出来的,而是从工程测试和运动模拟需求里长出来的机构。
六自由度平台解决的核心问题,不是“让平台动起来”,而是把一个刚体在空间中的 6 个自由度同时、可控地组织起来。
理解这类平台,可以先看三个层级:
| 层级 | 关心的问题 | 对应内容 |
|---|---|---|
| 机构层 | 为什么是动平台、定平台和 6 支支链 | 并联机构与六自由度约束 |
| 运动层 | 目标姿态如何变成每支电缸的长度 | 逆运动学与控制链路 |
| 工程层 | 为什么同样机构在不同项目里体验差异很大 | 控制系统、接口、安全和现场调试 |
这篇文章按这三个层级展开:先讲它的来历和自由度,再讲 6 支支链为什么能控制空间刚体,最后讲控制系统为什么决定平台能不能真正用于驾驶模拟、振动试验、海工补偿和文旅体验。
二、为什么更准确叫 Gough-Stewart 平台
很多人把这种机构直接叫 Stewart 平台,这个说法没有错,但不完整。更准确的名称是 Gough-Stewart 平台,因为它的工程源头、论文传播和商业化应用并不是同一个时间点完成的。
| 时间 | 人物 / 工作 | 对这类机构的意义 |
|---|---|---|
| 1950 年代 | Eric Gough 的轮胎测试机 | 用 6 支可伸缩支链并联支撑平台,用于复现轮胎复合载荷 |
| 1962 年前后 | Klaus Cappel 的运动模拟器专利 | 推动这类六杆并联机构进入商用运动模拟器方向 |
| 1965 年 | D. Stewart 论文《A Platform with Six Degrees of Freedom》 | 把六自由度平台作为飞行模拟机构系统化发表,让 Stewart 平台这一名称广泛传播 |
这段历史的价值,不只是纠正名字。它说明六自由度平台从一开始就服务于“复合载荷”和“真实运动复现”两类问题:Gough 用它做轮胎测试,Stewart 用它讨论飞行模拟,Cappel 推动它进入商用模拟器。今天它继续用于振动试验、驾驶 / 飞行模拟、海工补偿和动感体验,本质上还是在解决同一类问题。
因此,本文后面讨论“为什么是 6 支腿”“为什么并联结构刚度高”,不是在讲一个抽象几何机构,而是在解释一个已经被工程应用反复验证的设计取舍。
三、六个自由度分别是什么
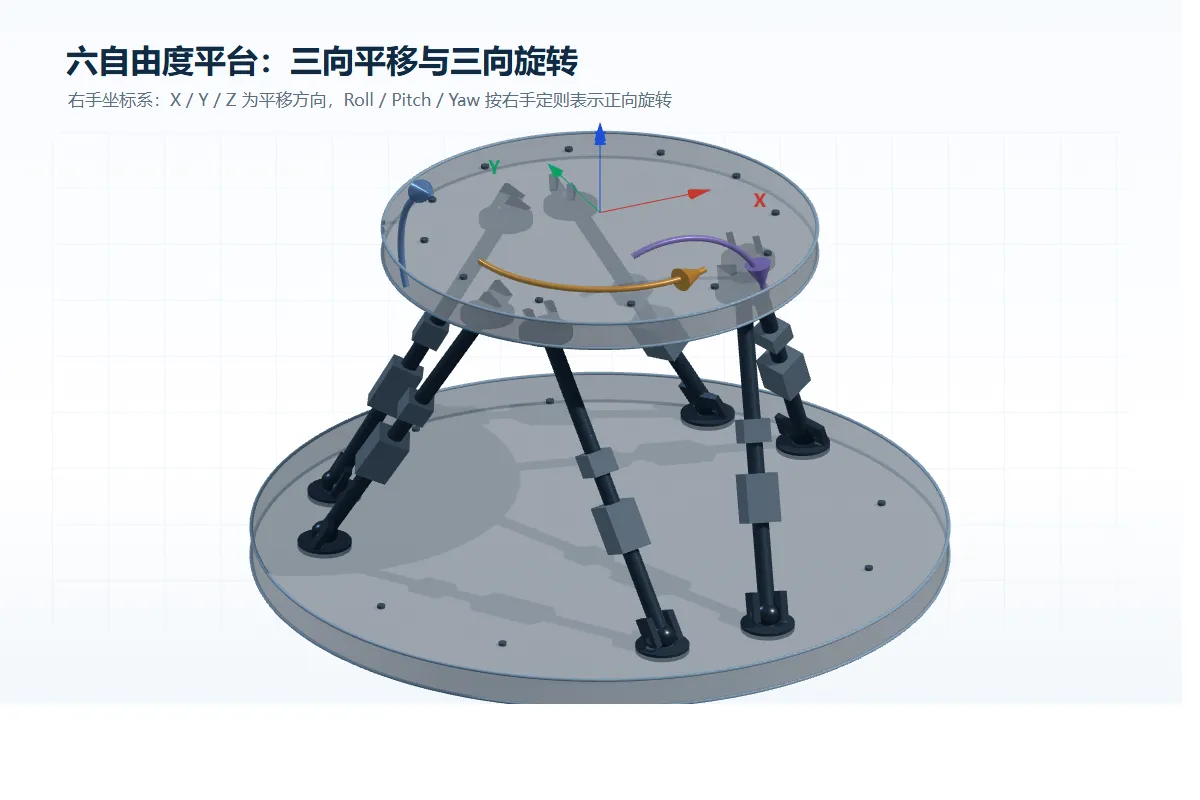
一个刚体在三维空间中,最多需要 6 个独立变量来描述它的位置和姿态:3 个方向的平移,加上 3 个方向的旋转。六自由度平台要控制的,正是这 6 个变量。
| 自由度 | 名称 | 说明 |
|---|---|---|
| Tx | 横移 | 沿 X 轴平移 |
| Ty | 纵移 | 沿 Y 轴平移 |
| Tz | 升降 | 沿 Z 轴平移 |
| Rx | 滚转 (Roll) | 绕 X 轴旋转 |
| Ry | 俯仰 (Pitch) | 绕 Y 轴旋转 |
| Rz | 偏航 (Yaw) | 绕 Z 轴旋转 |
平移决定“平台到哪里”,旋转决定“平台朝向哪里”。如果只做升降,那只是一个自由度;如果只做俯仰和滚转,那也只是两个旋转自由度。真正的六自由度运动,是位置和姿态同时变化。
真实世界里的运动很少只发生在一个方向。汽车驶过减速带,并不是单纯升降,而是升降、俯仰、滚转同时出现;船舶在海浪中也不是单独摇摆,而是多个方向持续耦合。六自由度平台的价值,正是把这些耦合运动放到一个可控的机械系统里复现出来。
这也是为什么很多项目不能只问“能升降多少”。对驾驶模拟来说,俯仰和滚转会影响加减速、转弯和路感;对振动试验来说,小幅高频的多方向输入可能比大行程更重要;对海工补偿来说,平台需要跟随或抵消的往往是完整姿态,而不是某一个轴。
四、为什么通常用 6 支支链
经典 Gough-Stewart 平台通常使用 6 支可伸缩支链。直觉上可以这样理解:动平台有 6 个自由度,要把它的位置和姿态完全控制住,系统需要足够的独立约束;每支可伸缩支链在两个铰点之间形成一条长度约束,6 支支链正好对应一组可以控制空间刚体的基本约束。
这并不是说“只有 6 支腿才叫六自由度机构”,工程上也存在冗余驱动、特殊构型和多支链平台。但在最经典、最常见的 Stewart 构型里,6 支支链提供了结构、控制和工程实现之间的平衡:少了通常无法完整控制 6 个自由度,多了就要处理冗余约束、内力分配和同步控制问题。
| 支链数量 | 工程含义 | 典型问题 |
|---|---|---|
| 少于 6 支 | 独立约束不足 | 某些方向无法完整控制,平台可能留下自由运动 |
| 6 支 | 经典 Stewart 构型 | 控制链路清晰,结构和驱动数量平衡 |
| 多于 6 支 | 冗余驱动或特殊构型 | 需要管理内力、同步和控制分配 |
6 支支链的价值,不只是“数量刚好”,而是在刚体控制、结构刚度和工程复杂度之间取得了常用平衡。
支链越多,并不自动意味着平台越好。多支链可以在某些项目里提高承载、扩展构型或增加安全余量,但也会让机械装配、控制分配和故障诊断更复杂。对多数运动模拟和试验平台来说,经典 6 支链结构已经足以覆盖主要需求。
五、并联结构为什么刚度高
同样都能实现空间运动,串联机械臂和并联六自由度平台的结构逻辑完全不同。机械臂把多个关节首尾相接,优点是工作空间大、可达范围广;六自由度平台把多支支链同时连到一个动平台,优点是载荷路径短、闭环约束强,更适合承载、姿态模拟和试验输入。
| 特性 | 串联(机械臂) | 并联(六自由度平台) |
|---|---|---|
| 结构 | 6 个关节串行连接 | 6 支腿并联到一个动平台 |
| 优势方向 | 工作空间大、末端可达范围广 | 刚度高、承载路径短、姿态控制稳定 |
| 载荷路径 | 末端载荷沿各关节逐级传递 | 载荷由多支支链分担到定平台 |
| 误差特征 | 关节误差会沿串联链累积 | 多条支链共同约束动平台 |
| 典型场景 | 搬运、焊接、装配、加工 | 模拟训练、振动试验、姿态平台 |
关键差异在于载荷路径。串联机械臂像一条从底座伸出去的链条,末端负载会沿每个关节逐级传递;并联平台则像一个闭环支撑结构,动平台上的载荷被分配到多支支链,再回到定平台和基础上。对同样的负载和姿态扰动,闭环结构通常更容易获得高刚度。
这也是六自由度平台常用于振动试验、精密姿态控制和模拟训练的原因:这些场景不一定需要很大的工作空间,但需要平台在有限空间内稳定、重复、可控地输出运动。反过来,如果项目需要大范围抓取、绕开障碍物或复杂路径操作,串联机械臂反而更合适。
所以并联平台和机械臂不是谁替代谁,而是面向不同任务。六自由度平台真正擅长的,是在有限工作空间内,把一个承载平台的六个自由度做得稳定、同步、可重复。
六、从目标位姿到杆长
客户软件通常关心的是“平台要到什么位置和姿态”:比如向前俯仰多少、向左滚转多少、升降多少。平台本体真正执行的,却是 6 支电缸各自伸到什么长度。把目标位姿转换成 6 路杆长指令,就是六自由度平台控制链路里的核心翻译。
可以把它分成两类问题:
| 问题 | 已知什么 | 要求什么 | 工程意义 |
|---|---|---|---|
| 逆运动学 | 目标位置和姿态 | 6 支电缸的目标长度 | 控制器实时下发指令的主链路 |
| 正运动学 | 6 支电缸当前长度 | 动平台实际位置和姿态 | 状态估计、校验和诊断时会用到 |
对并联平台来说,逆运动学相对直接:目标姿态确定后,每支支链上下两个铰点的空间位置也随之确定,两点之间的距离就是该支电缸的目标长度。正运动学则更复杂,因为要从 6 个长度反推出平台位姿,通常没有同样直观的解析路径。
因此,六自由度平台的客户接口通常围绕位姿、轨迹、动作模式和状态反馈组织。控制器内部再完成运动学计算、限位判断、伺服同步和安全保护。这样客户不需要直接处理底层支链长度,也不需要关心内部伺服总线。
七、控制系统的角色
机械结构决定平台有没有能力完成六自由度运动,控制系统决定这些运动能不能安全、平顺、可重复地交付给项目。对客户来说,平台不是“能动”就够了,还要能接入系统、保护人员和设备、按验收动作稳定运行。
| 控制环节 | 解决的问题 | 项目里常见关注 |
|---|---|---|
| 回零与基准 | 平台从哪个几何基准开始运行 | 开机流程、传感器状态、工作面定义 |
| 轨迹生成 | 指令如何变成连续、平顺的动作 | 换向是否突兀、动作是否抖动、体感是否自然 |
| 安全保护 | 超限、急停、通信中断时怎么处理 | 限位、急停、软硬件保护、异常恢复 |
| 接口联调 | 外部系统如何下发动作和读取状态 | TCP / UDP / WebSocket / HTTP、仿真软件、采集系统 |
| 现场标定 | 同一套硬件如何适配不同项目 | 载荷、座舱、夹具、视景和验收脚本 |
六自由度平台的最终体验,往往不是由单个机械参数决定,而是由机械结构、控制策略、接口联调和现场调试共同决定。
这也是为什么同样是 Stewart 结构,不同项目的交付重点会差很多。驾驶模拟更看重体感线索和视景同步;振动试验更看重重复性、谱导入和数据闭环;文旅体验更看重安全边界、运营维护和内容同步;教学科研则更看重开放接口和可解释性。
因此,评价一台六自由度平台,不能只看支链数量、最大载荷或最大行程。更实际的问题是:它能不能稳定回到基准、能不能接入你的上位机、能不能按你的验收脚本重复运行、异常时能不能进入安全状态。机构是骨架,控制系统才让它变成可交付设备。
八、哪些项目适合六自由度平台
六自由度平台适合的,不是所有“需要动”的项目,而是那些需要同时控制位置、姿态、体感或试验输入的项目。判断是否适合,可以先看任务是不是天然包含多方向耦合运动。
| 应用方向 | 为什么适合六自由度平台 | 继续阅读 |
|---|---|---|
| 驾驶模拟 | 车辆加减速、转弯、路面冲击通常包含升降、俯仰、滚转等耦合体感 | 驾驶模拟方案 |
| 飞行 / eVTOL 模拟 | 起降、转弯、爬升和姿态变化需要座舱同步输出多方向运动线索 | 飞行模拟方案 |
| 振动与道路谱试验 | 被测件在真实道路或工况中承受多方向耦合输入,需要可重复的试验动作 | 振动试验方案 |
| 海工补偿与主动稳定 | 船舶或平台受波浪影响时,姿态扰动本身就是六向耦合运动 | 海工补偿方案 |
| 教学科研 | 并联机构、控制算法、接口开发和运动学实验都需要可解释的六自由度平台 | 教学科研方案 |
| 文旅体验 | 影片、VR 或互动内容需要把视觉、声音和体感同步起来 | 文旅体验方案 |
如果项目只需要单一升降、简单摆动或局部动作,六自由度平台未必是最合适的方案。反过来,如果项目需要同时处理载荷、重心、姿态、接口和安全边界,就应该按六自由度平台思路评估。
彦控当前产品按段位和应用组织:单机标准段位覆盖 50 KG-10 t,大负载定制已交付 15 t,多机同步组阵按 40 t 级项目评估。具体配置仍要按载荷、重心、运动幅度、接口和现场条件确认,可从 六自由度平台选型指南 或 产品中心 继续收敛。
参考资料
- D. Stewart, A Platform with Six Degrees of Freedom, Proceedings of the Institution of Mechanical Engineers, 1965.
- Ilian A. Bonev, The True Origins of Parallel Robots, ParalleMIC.