运动洗出算法(motion cueing / washout algorithm)是运动模拟器的核心环节。它需要化解一个表面上不可调和的矛盾:真实车辆可以持续加速十余秒、位移数百米,而运动平台的行程通常仅数十厘米。算法的任务,是在这一有限行程内还原受试者所经历的运动感知。该问题得以求解,并非依赖增大平台尺寸,而是基于对人体运动感知机理的利用——有选择地呈现真实运动中最具感知价值的成分。
一、有限行程与无界运动的核心矛盾
矛盾的实质可由一个具体情形说明。当车辆以 0.3 g 持续加速 10 秒时,受试者持续感受到纵向的惯性力,车辆同时前行上百米。若要求平台以相同方式加速,则平台前移数十厘米即达行程极限,其余九秒无法再现。
转机在于:受试者所需的并非位移,而是加速度带来的感知。位移可以舍弃,只要”持续受力”的感知得以保持。问题由此从”复现运动”转化为”复现感知”,而感知可由远小于真实运动的平台动作等效呈现。这正是洗出算法存在的根本依据。
二、比力感知与重力混淆的生理基础
欲有效等效感知,须先了解感知机制本身。人对直线运动的感知主要来自内耳的耳石器官,其感知量并非纯加速度,而是比力(specific force)——加速度与重力的合力。以最简形式表示:
耳石器官仅获取该合力 ,无法将其中的水平加速度分量与重力分量分离。这是等效原理在感知层面的体现:处于水平加速状态的受试者,与身体后倾一定角度的受试者,其耳石所感知的比力方向可以完全一致。
耳石器官无法区分”加速”与”倾斜”——这一感知不可分性,是有限行程等效持续加速度的根本前提。
转动感知则由半规管承担,其对角速度敏感,并具有明确的感知阈值:当角速度低于该阈值(驾驶模拟研究中常用的倾斜协调角速度上限约为每秒数度,详见《驾驶模拟器用几自由度》)时,转动不被感知。耳石的比力不可分性与半规管的感知阈值这两项生理事实,构成了洗出算法双通道结构的物理基础。
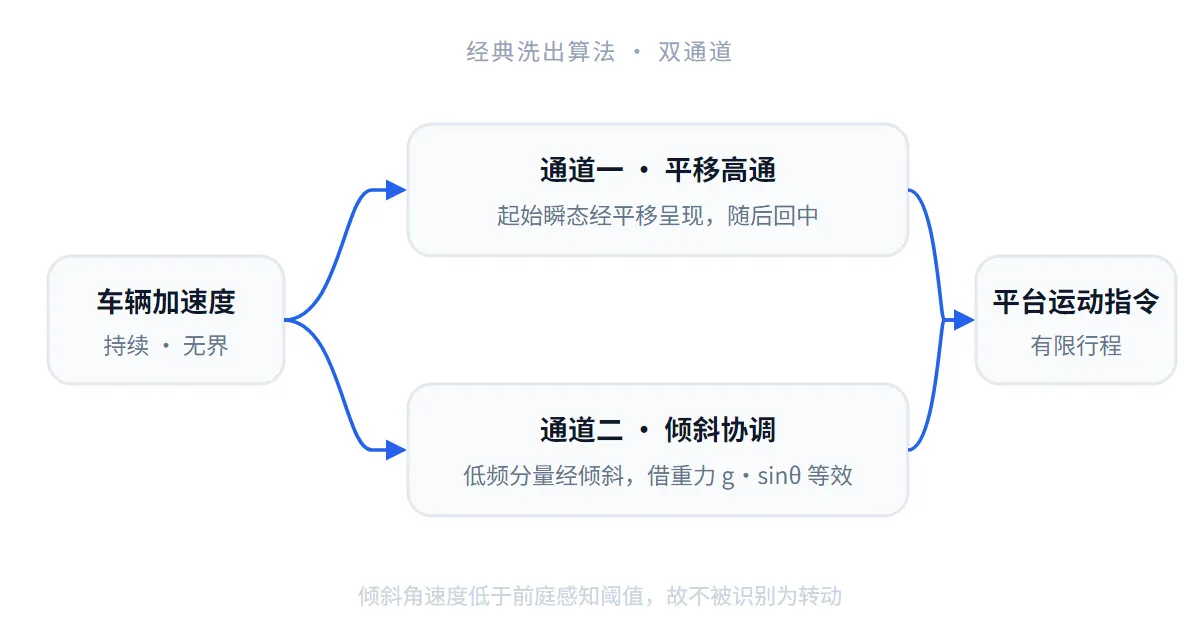
三、经典洗出的双通道结构与倾斜协调
经典洗出滤波器(由 Conrad 与 Schmidt 提出、Reid 与 Nahon 于 1985 年系统化)将各方向的加速度信号按频率分解为两路处理。
平移高通通道,还原起始瞬态。 运动发生初期,加速度变化率最高、感知最强,最具备以有限平移行程还原的价值。算法对加速度施加高通滤波,仅令高频瞬态通过,驱动平台产生一段真实平移,如实呈现起始惯性力;瞬态过后,平台依滤波特性缓慢返回中位,其速度低于感知阈值,以释放行程用于后续动作。
倾斜协调通道,等效持续分量。 经高通滤除的低频分量对应持续加速度,被导入第二通道。算法使平台缓慢倾斜角度 ,令重力沿身体纵轴的分量参与合成:
耳石器官所获取的比力在方向与量值上均接近真实的持续加速度,且因其不可分性而将该倾斜感知为持续加速。前提是倾斜角速度须低于半规管阈值,否则该倾斜将被识别为转动,产生感知冲突。此环节即倾斜协调(tilt coordination)。
转动通道同理:角速度经高通处理,快速转动如实呈现,持续转动被滤除,因持续匀速转动本不被感知。三个平移与三个旋转自由度各自如此处理,再合成为平台运动指令。
高通滤波何以内含”回中”特性。 平移通道的高通常取二阶形式,其传递函数为
其关键性质是在零频()处增益为零,即直流分量被完全抑制。持续加速度对应加速度信号中的低频与直流成分,故被该滤波器天然滤除;而滤波器对阶跃输入的响应先上升、后衰减至零,此”衰减至零”在物理上即对应平台的缓慢回中。回中并非附加环节,而是高通特性的内在结果。倾斜通道则以互补低通 提取被抑制的低频分量,用于倾斜协调。
交越频率 是首要设计参数。 它界定”起始瞬态”与”持续分量”的频率分界: 取值偏高时,更多信号被归为持续分量而滤除,行程占用减少,但线索衰减、假线索风险上升; 取值偏低时,保留更多真实平移,感知更充分,但行程占用增加、易触及边界。阻尼比 决定回中过程的平稳性。倾斜通道还须对倾斜角速率限幅,将 约束在半规管阈值以下,此为倾斜协调不被识别为转动的硬性条件。该结构计算量小、参数物理意义明确,是经典洗出至今仍作为工业基线的原因。
四、假线索的成因与抑制
洗出的本质是对感知的选择性等效,而等效存在失效风险。当算法呈现出真实运动中不存在的感知时,即产生假线索(false cue)。假线索的危害甚于线索缺失,因其向中枢提供相互矛盾的信号,是晕动症的主要诱因。
假线索主要有两处成因。其一为回中过程:平台返回中位的动作若速度过高,其本身被耳石感知为一次反向加速度——车辆仍在前行,受试者却感知到短暂的反向惯性力。其二为倾斜协调越限:倾斜角速度若超过半规管阈值,受试者将同时感知到”加速”与”转动”两个信号,形成冲突。经典洗出以固定增益与预先整定的滤波器,在”还原真实线索”与”抑制假线索”之间取得折中——增益偏大则感知充分但失真风险高,增益偏小则线索纯净但临场感不足。该折中点随车辆、内容与平台而异,不存在通用参数。
五、从经典到最优、自适应与模型预测控制
经典洗出的局限明确:增益固定、不感知平台边界,既导致行程利用不足,又易在边界处硬饱和。数十年间,算法沿数条路径演进,目标均为降低假线索并提升行程利用率。
| 算法 | 增益的确定方式 | 是否处理行程边界 | 代价 |
|---|---|---|---|
| 经典洗出 | 固定,预先整定滤波器 | 不感知 | 结构简单、计算量小;易生假线索、行程利用不足 |
| 最优洗出 | 车辆-前庭模型,求解 Riccati 方程 | 隐式 | 线索更贴合感知;依赖可信的前庭模型 |
| 自适应洗出 | 随平台状态在线调整(梯度下降) | 接近边界时收紧 | 边界处更稳健;整定逻辑复杂 |
| 模型预测控制 MPC | 每步在线求解带约束优化 | 显式约束 + 前瞻 | 行程利用与保真度最优;实时计算负荷最高 |
最优洗出将”感知逼真度”表述为可最小化的目标泛函。 它不直接比较真实运动与平台运动,而是使二者各自通过一个前庭感知模型,换算为”所感知的运动”后再作比较。前庭模型具有公开的传递函数形式:耳石器官对比力的响应近似为一个超前-滞后环节,半规管对角速度的响应近似为一个高通环节(这也解释了持续转动不被感知的现象)。据此,代价函数表述为
其中 为”所感知的真实运动”与”所感知的平台运动”之差, 为平台控制量,、 为权衡线索保真与行程/控制代价的权重矩阵。在线性模型下,最小化 归结为求解代数 Riccati 方程,得到一组最优常值增益——这正是最优洗出较手工整定更贴合感知的原因。自适应洗出在此基础上使增益不再为常值,而随平台状态在线变化(中位附近放宽、接近边界收紧),以梯度下降实时调整。
MPC 将行程约束由软约束转为硬约束。 它在每个控制周期内向前预测一段有限时域,求解带约束的优化问题:目标仍为最小化感知误差 ,而平台的位置、速度、加速度上下限被显式写入约束,故优化解天然不越界;结合对未来输入的前瞻(look-ahead),可预先将平台调整至有利位置,为即将到来的大幅动作预留行程。其代价是每步均需实时求解带约束优化,计算负荷最高。近年亦有基于深度强化学习的实时线索研究,其目标一致:在有限行程内最大化感知逼真度、最小化假线索。
这一演进路径的共性,在于对同一有限资源的分配。
平台行程是一种有限资源,洗出算法是对该资源的分配策略——算法的优化程度越高,同等行程所能实现的感知逼真度越高。
六、运动线索算法对选型的影响
将上述原理转化为选型判断,可归结为一点:
运动模拟器的体感质量在很大程度上由软件(洗出算法)决定,而非仅取决于平台的行程与承载。
同一台六自由度平台,配置经典洗出与配置 MPC、是否针对本项目的车辆动力学与内容完成参数整定,其体感可存在显著差异。
因此,评估运动模拟器时,除平台机械参数外,宜明确以下三项:
- 线索算法的类型与成熟度——采用经典、最优、自适应或 MPC;是否针对本项目的运动特性(车辆/飞行器动力学、典型工况)完成整定。
- 假线索的处理方式——供应商在还原度与舒适度(抑制晕动)之间的取舍策略,及可调手段。
- 接口的开放程度——能否接入客户或第三方自研的运动线索算法,此项对科研与高端训练项目尤为关键(开放接口的意义详见运动平台开放接口怎么选)。
彦控在运动模拟项目中提供平台本体、运动控制与开放接口:控制系统开放 TCP/UDP/WebSocket/HTTP,既可采用内置运动线索处理,亦支持客户在上位机侧运行自研洗出算法、将平台作为受控运动执行层。具体场景与平台的对应关系详见驾驶模拟方案页。
参考资料
- L. D. Reid, M. A. Nahon, Flight Simulation Motion-Base Drive Algorithms: Part 1 — Developing and Testing the Equations, UTIAS Report No. 296, University of Toronto Institute for Aerospace Studies, 1985
- R. V. Parrish, J. E. Dieudonne, D. J. Martin, Motion Software for a Synergistic Six-Degree-of-Freedom Motion Base, NASA TN D-7350
- B. Conrad, S. F. Schmidt, Motion Drive Signals for Piloted Flight Simulators, NASA CR-1601
- M. Bruschetta et al., A Model Predictive Control-Based Motion Cueing Algorithm with Actuator-Based Constraints for Driving Simulators, Vehicle System Dynamics
- MPC-Based Motion-Cueing Algorithm for a 6-DOF Driving Simulator with Actuator Constraints, Vehicles (MDPI), 2020
- ICAO Doc 9625, Manual of Criteria for the Qualification of Flight Simulation Training Devices (Objective Motion Cueing Test, OMCT)
延伸阅读
- 驾驶模拟器用几自由度 — 倾斜协调与体感线索的选型视角
- eVTOL 飞行模拟器怎么选 — 加速度起始线索与培训级鉴定
- 驾驶模拟方案 — 平台、线索算法与接口的整机边界