电动和液压六自由度平台没有绝对优劣,关键看项目落在哪个工程区间。电动平台更适合实验室、教学科研、模拟训练、文旅娱乐和多数中小载荷试验场景;液压平台仍适合部分超大载荷、强冲击、高能量输入或已有液压基础设施的项目。选型时应同时看载荷、行程、频响、维护条件、洁净度和现场集成成本。
一、先分清气动、液压、电动
六自由度平台靠 6 条作动腿的伸缩来驱动动平台,作动方式主要有三种:电动(伺服电动缸)、液压(液压缸)和气动(气缸)。但真正需要在仿真和试验里权衡的只有电动和液压两类——气动可以先排除。
气动靠压缩空气推动,而空气可压缩,位置和力都难以精确控制,只能做”到位 / 不到位”的粗动作,无法精确停在任意姿态。所以气动平台只用在成本敏感、精度要求低的动感座椅和低端体感设备上,不进入驾驶 / 飞行模拟、振动试验、精密对接这类要求姿态精度的场景。
气动管的是低端动感座椅,不碰精密姿态;真正要在工程里权衡的,是电动和液压。
把气动放到一边,六自由度平台的驱动之争,就是电动和液压之间的取舍。两者没有绝对的高下,只有适不适合——下面分别看它们各自的长处和代价。先看液压。

二、液压强在哪、代价是什么
液压的长处,根子在一句物理:液体几乎不可压缩。泵把油压到很高的压强,作用在液压缸活塞上就是巨大的推力,而且这个力来得直接、稳定。由此带来三个客观优势:
- 力密度高——同样的输出力,液压缸比电动缸更紧凑、更轻;要在有限体积里榨出极大推力,液压有先天优势。
- 大推力配大位移——液压能在较低频率下同时给出很大的力和很大的行程,适合重型、大幅度的运动。
- 抗冲击——面对强冲击载荷和大惯量负载,液压的力裕度和刚性表现更稳。
这就是为什么大型振动台、重型整车试验台、超大载荷模拟器历来以液压为主——MTS、Moog 这类高端重型设备的看家方案就是电液伺服。在超大推力 + 大位移 + 强冲击这个区间,液压目前仍难以替代。
但这些长处都有对应的代价:
- 要一整套液压站——泵、油箱、阀组、油管自成一个系统,占地、布管,还需要单独的安装与散热空间。
- 油液维护——有漏油风险,需要定期换油、过滤、检查密封,长期维护成本和工作量都不低。
- 洁净度受限——系统里有油,不适合洁净实验室、医疗、食品、半导体等对洁净度敏感的环境。
- 高频与波形——在很高的频率段,电液系统的响应和波形保真度会下降。
液压的优势和代价是同一枚硬币:那套能榨出巨大推力的液压系统,本身也是要占地、要维护、带着油的系统。
把液压的”强”和”累”都摆清楚,再看电动是另一套取舍。
三、电动强在哪、边界在哪
电动六自由度平台用伺服电动缸驱动——电机经丝杠直接把旋转变成直线推力,省掉了泵站、阀组和油管。这套”电机直接出力”的结构,带来一组和液压几乎互补的优势:
- 响应快、精度高——伺服闭环控制,能快速、精确地停在任意姿态,位置和力都可控、可重复。
- 洁净无油——没有液压油,适合洁净实验室、医疗康复、半导体、展厅和训练舱这类对洁净度敏感的环境。
- 维护简单——没有油液系统,免去换油、查漏、换滤芯这些活,日常主要是丝杠和电机的常规保养。
- 即开即用、能效高——不需要泵站长时间空转,启动快、噪音低、待机能耗低。
- 数字化友好——天然贴合伺服总线和数字控制,便于和上位机、仿真系统对接。
电动的边界也很清楚:单缸力密度不如液压。同样体积下,电动缸能给出的最大推力通常低于液压缸;在超大推力、超大位移叠加的极重型工况里,电动要做到同等指标,缸体和结构的成本、体积会上升得很快。
但这条边界这些年一直在上移。行星滚柱丝杠等传动让电动缸的推力大幅提升,电动平台能覆盖的载荷级别随之抬高。以彦控为例,电动六自由度平台标准型号覆盖单机 50 KG 到 10 t,大负载定制已交付 15 t 级,更大载荷通过多机同步组阵(40 t 级)实现,超大推力场景还可定制大推力电缸扩展。很多过去默认”只能上液压”的项目,如今电动已经能接。
电动和液压的优势几乎是互补的:电动赢在洁净、精度和维护,液压赢在单缸的力密度。而这条边界不是固定的——电动能覆盖的载荷一直在往上走。
优势互补,就意味着选型不是比”谁更先进”,而是看项目落在谁的区间。这就要把分水岭画出来。
四、按载荷、冲击和环境画出分水岭
电动和液压既然互补,选型就不该问”哪个更先进”,而该问”我的项目落在谁的区间”。把前两章的事实并成一张表,分水岭就清楚了:
| 维度 | 电动(伺服电动缸) | 液压(液压缸) |
|---|---|---|
| 单缸力密度 | 较低 | 高 |
| 超大推力 + 大位移 | 受限,成本体积上升快 | 强项 |
| 精度与重复性 | 高 | 较高 |
| 高频响应 | 好 | 高频段下降 |
| 洁净度 | 无油,洁净 | 有油,受限 |
| 维护 | 低,无油液系统 | 高,换油 / 查漏 |
| 占地与系统 | 紧凑,免泵站 | 需液压站、油管 |
| 噪音与能效 | 低噪、待机能耗低 | 泵站有噪音和发热 |
| 典型载荷段 | 中小到中大(10 t 级、定制 15 t、多机 40 t) | 中大到超重型 |
有一点常被忽略:别拿单缸推力直接比平台能扛多少。六自由度平台是 6 条腿并联,平台的承载不是单缸推力简单乘以 6,而是几何和位姿的函数——中位附近 6 缸分担最均匀、能扛得最多,到极限位姿时少数腿受力被放大,额定载荷要按最坏工况收。所以判断一台平台的能力,要看它整机的额定载荷和实际交付实绩,而不是单缸参数;电动平台能做到 10 t、15 t,靠的是整机机构设计,不是”单缸 15 t”。
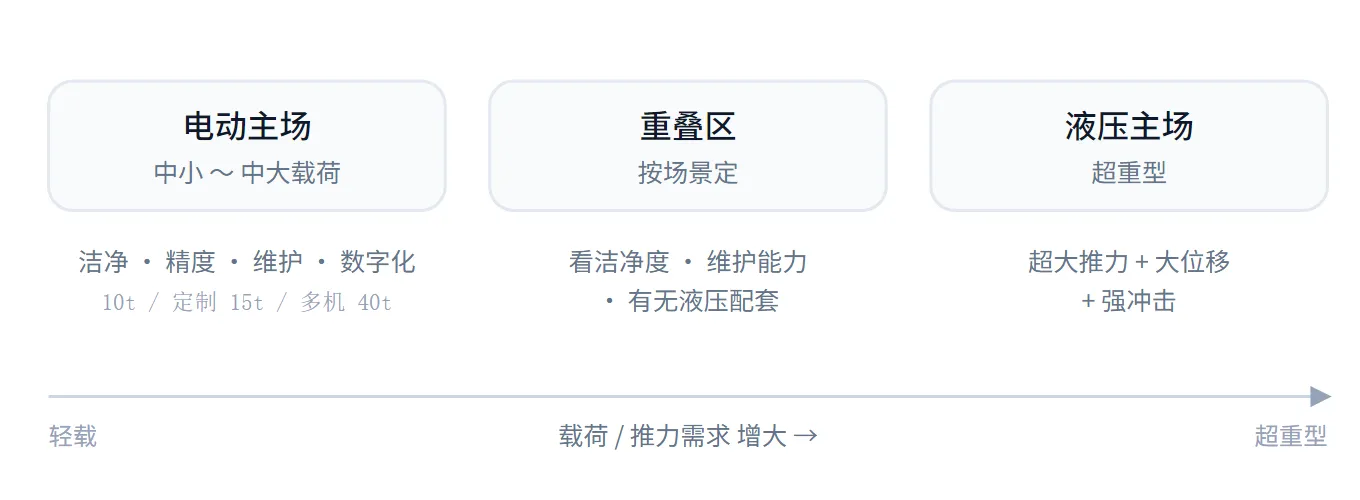
落到分区上,就是一条很实的判断线:
- 偏电动——看重洁净、精度、维护和数字化,载荷在中小到中大段,现场没有也不想上液压站。模拟训练、振动试验、教学科研、医疗康复、文旅娱乐等项目,很多会先落在这一区评估。
- 偏液压——超大推力、超大位移、强冲击叠加的极重型工况,或现场已有成熟液压配套。大型整车试验台、超重型振动台仍是液压的主场。
- 重叠区——中间地带按洁净度、维护能力和有没有液压配套来定,没有标准答案。
分区画清楚了,最后把它落成你项目里可以直接问自己的几个问题。
五、决定方向的五个问题
把分水岭落到具体项目,其实就是依次回答几个问题。它们不需要精确参数,凭项目常识就能答,答完方向基本就定了:
| 问题 | 偏电动 | 偏液压 |
|---|---|---|
| 载荷在什么段、有没有超大推力或强冲击? | 中小到中大、常规动态 | 超重型 + 大位移 + 强冲击 |
| 现场对洁净度有要求吗? | 实验室 / 医疗 / 半导体 / 展厅,要无油 | 无洁净要求的工业试验场 |
| 能不能维护一套液压系统? | 不想换油、查漏、养泵站 | 有液压运维能力和经验 |
| 现场有没有液压配套? | 没有,且不想新建一套 | 已有成熟液压站可顺势利用 |
| 要不要高精度、高重复性、数字化对接? | 要 | 精度要求相对宽松 |
很多项目答下来会发现自己落在电动一侧:载荷级别在往上走,而洁净、少维护、易集成的优势,又正是实验室、训练、研发和文旅场景常见的关注点。只有当项目真正进入超大推力、超大位移、强冲击叠加的极重型工况,或者现场已经围绕液压建好了体系,液压才更值得进入优先评估。
选型的终点不是”电动一定对”,而是按你的载荷、洁净度、维护和现场条件落在哪一侧——有时答案就是液压;对多数运动模拟与试验项目,电动已经能覆盖主要需求,且现场维护边界更清楚。
如果你不确定项目落在哪一侧,可以把载荷级别、现场环境(是否要求洁净)、有无液压配套和维护条件整理出来,工程师会据此给出电动方案,或在确实更适合液压时如实说明。电动六自由度平台的型号与定制能力,可参考 产品型号谱 与 振动与可靠性试验方案。
延伸阅读
- 六自由度平台选型指南 — 载荷、行程、频响、驱动、接口五步定位需求
- 六自由度运动平台原理详解 — 6 支腿并联与刚度的来龙去脉
- 特殊形态与定制能力 — 大推力扩展、多机同步与非标定制方向