软件截图
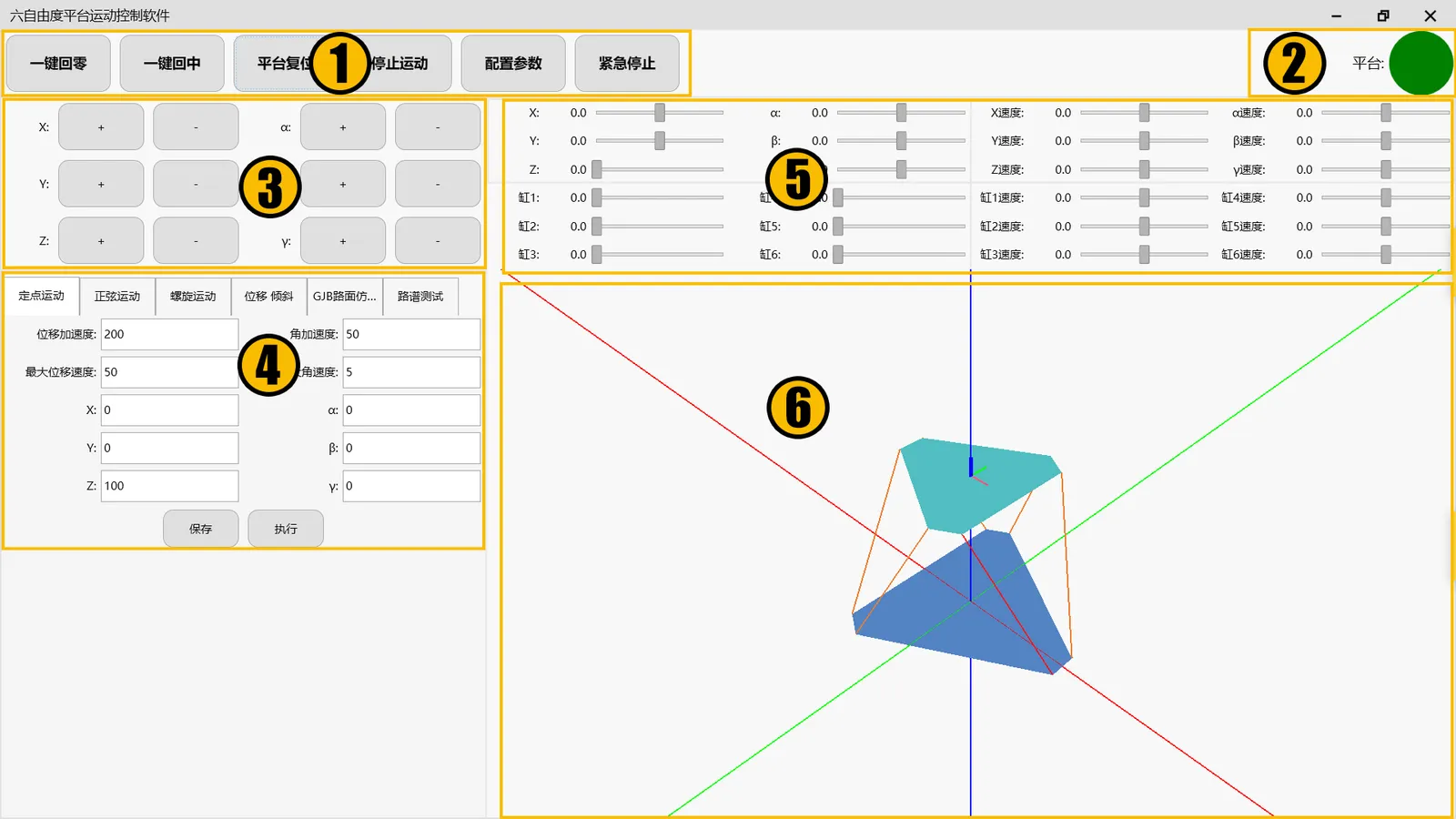
主界面 — 公式建模 + 实时波形监视
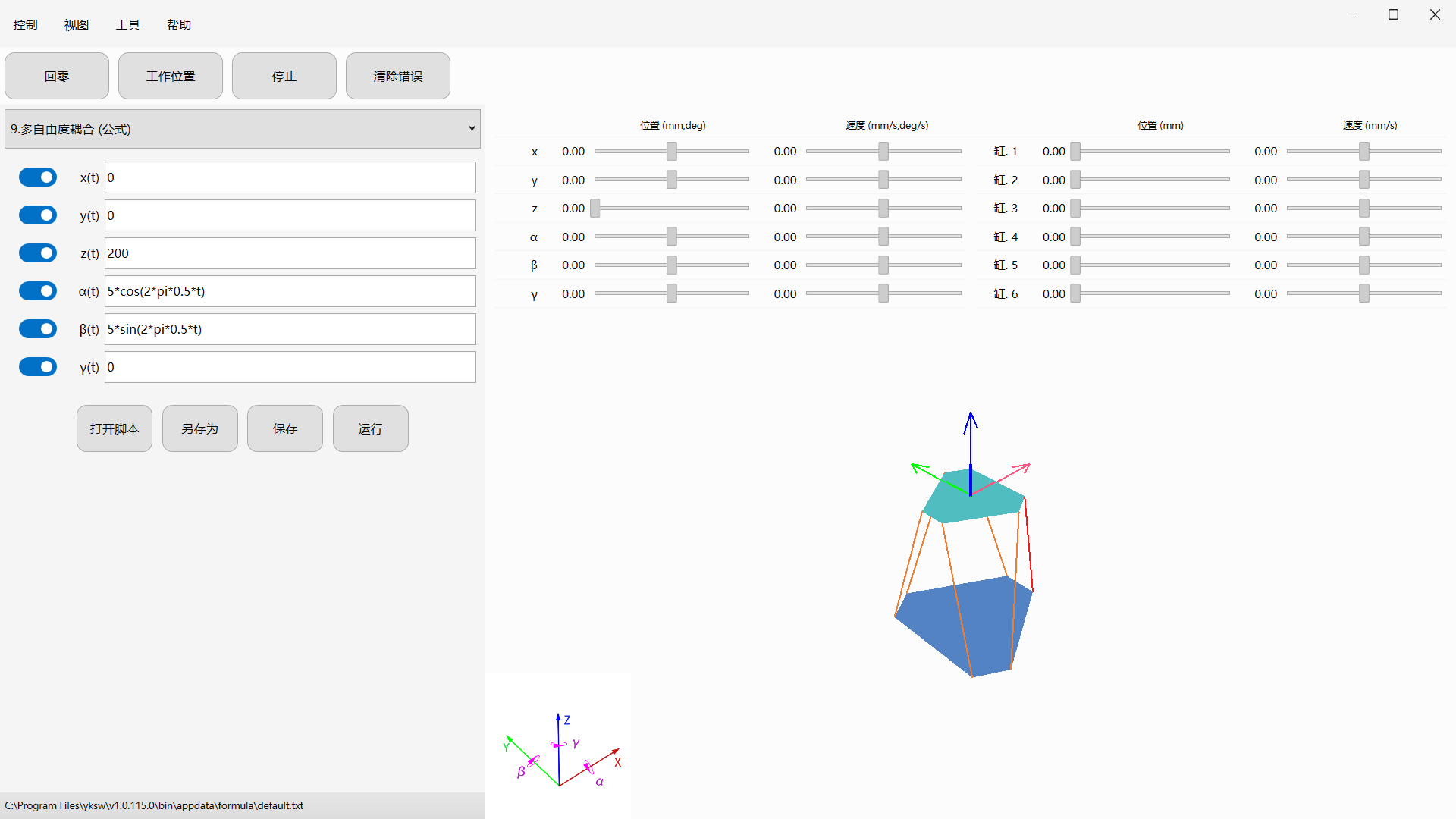
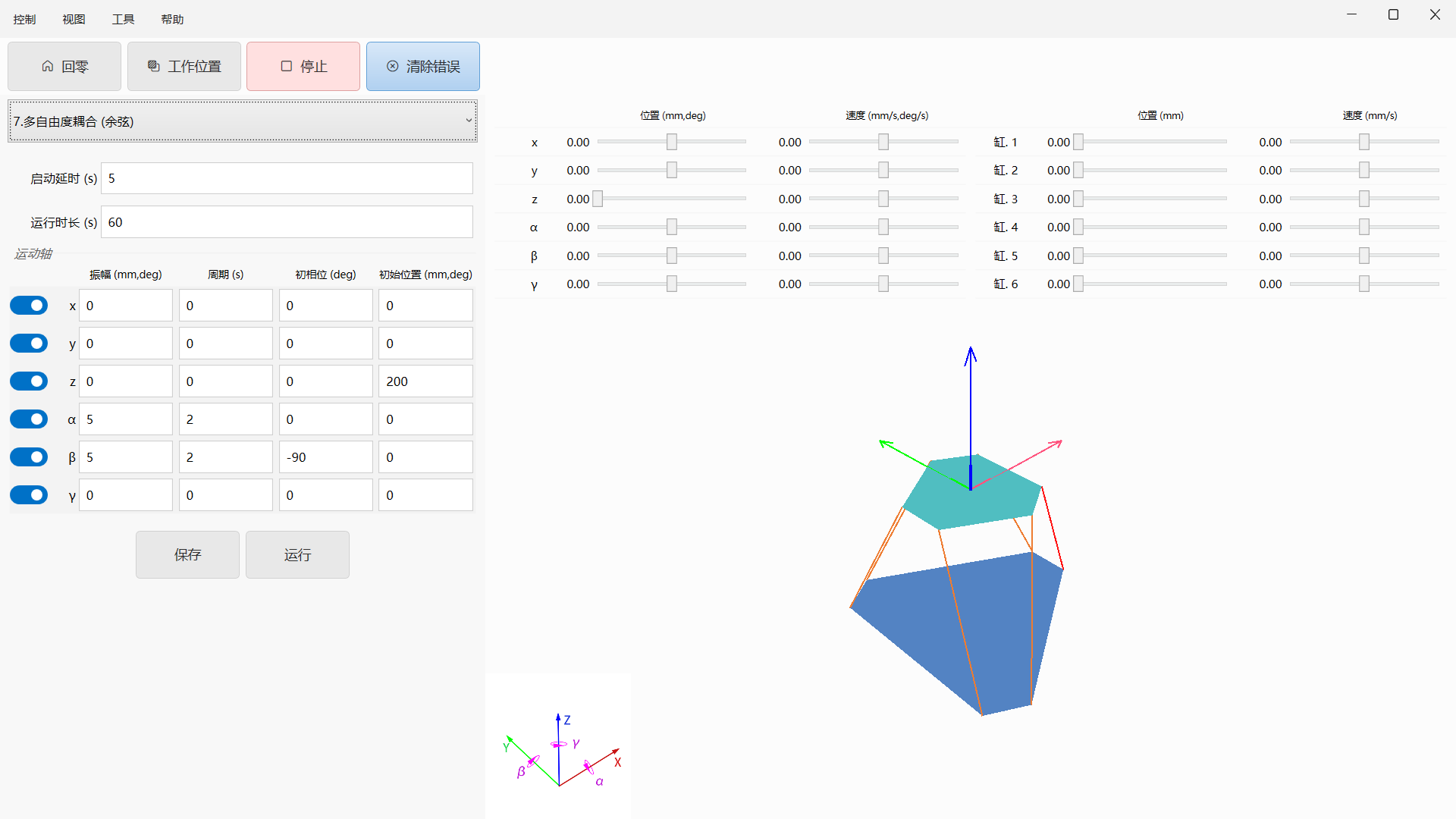
3D 可视化 — 平台姿态实时呈现
产品定位
yksw 解决的是平台出厂调试、现场操作和工程验证过程中的可视化控制问题。它把位姿控制、缸长控制、公式建模、3D 可视化和波形监视集中在同一套上位机软件中,与平台的运动控制器、运动控制系统配合,便于工程师排查机械、控制和接口侧问题。
实际项目会根据平台类型、控制方式、传感器配置和客户操作流程确认交付版本。页面中的功能说明用于建立沟通起点,不作为固定功能边界。
适用场景
适合优先考虑
- 设备出厂调试、现场安装和运动验证
- 高校 / 科研院所的运动控制教学与算法验证
- 客户运维、日常操作和状态监视
- 与 SDK 或开放协议配合,作为二次开发参考实现
需要进一步评估
- 客户已有自研上位机或固定操作流程
- 需要接入第三方采集系统、安全系统或仿真平台
- 需要多设备同步、远程诊断或特殊权限管理
- 现场操作员界面、语言和数据导出格式有定制要求
关键能力
- 控制通道
- 位姿控制与缸长控制双通道
- 公式建模
- 可输入运动公式生成 6 自由度轨迹
- 3D 可视化
- 平台机构、杆件和姿态状态实时显示
- 波形监视
- 位姿、缸长、速度、加速度等变量时序查看
- 安全动作
- 回零、工作位、停止、急停等高频操作集中呈现
- 配套关系
- 可与 SDK、开放协议和项目定制上位机协同使用
配置与扩展
需要自研上位机或深度二次开发时,可参考 SDK & 二次开发 与 开放通信协议。如果项目已有固定软件环境,优先确认操作系统、控制周期、数据导出格式和联调方式。