产品定位
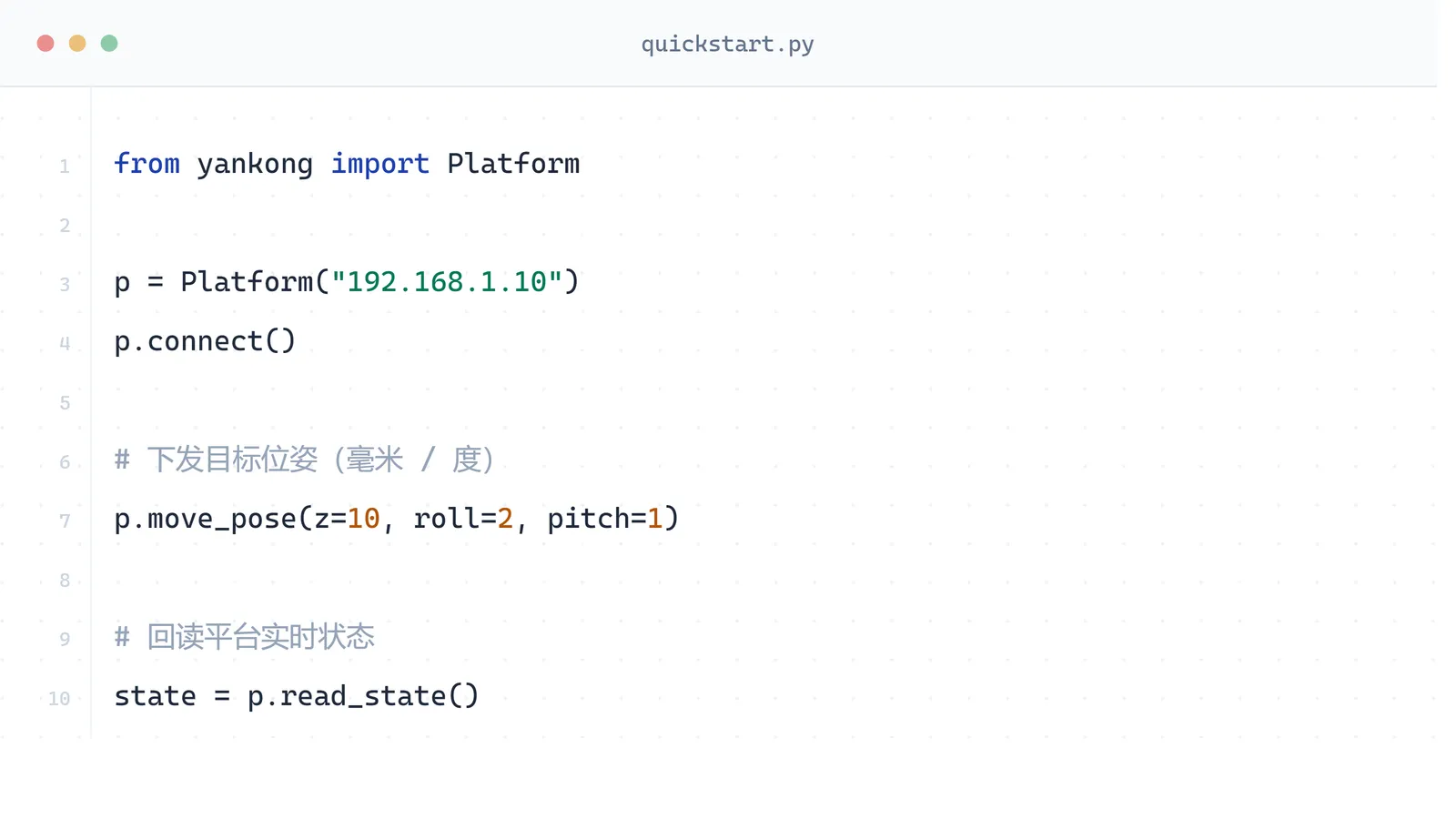
SDK 解决的是客户如何在自己的工具链中调用运动平台能力。并联运动平台进入实验室或测试现场后,二次开发通常发生在客户侧:HIL 试验、控制算法验证、Unity / ROS 仿真联调、自研上位机或测试系统集成。
实际项目会根据开发语言、操作系统、控制周期、数据格式和联调环境确认 SDK 交付方式。页面中的语言选项用于建立沟通起点,不作为固定交付边界。
适用场景
适合优先考虑
- 高校实验室自研算法验证和教学实验
- Matlab / Simulink HIL 试验和控制模型联调
- Unity / Unreal、ROS 或自研仿真平台接入
- 系统集成商定制上位机、测试台和自动化流程
需要进一步评估
- 客户已有软件架构、语言版本或部署环境较复杂
- 需要高频闭环控制、长时间数据记录或多设备同步
- 需要与第三方采集系统、安全系统或仿真平台联锁
- 需要源码级封装、特殊数据结构或定制示例工程
集成路径参考
Matlab / Simulink
控制模型通过 SDK 或接口示例下发位姿、读取平台状态。
- 场景
- 算法验证
- 边界
- 按模型周期确认
Unity / Unreal
仿真引擎输出运动状态,平台按项目控制策略同步姿态。
- 场景
- VR / 训练
- 边界
- 按帧率与网络确认
ROS
ROS Node 通过 Python 或 C / C++ 接口下发轨迹、读取反馈。
- 场景
- 科研联调
- 边界
- 按消息频率确认
自研系统
客户已有 .NET / Java / Web 系统可结合开放协议完成集成。
- 场景
- 测试 / 自动化
- 边界
- 按系统架构确认
关键能力
- 语言环境
- C / C++、Python、Matlab / Simulink、LabVIEW 等
- 操作系统
- Windows / macOS / Linux,具体支持按项目确认
- 控制能力
- 位姿控制、轨迹下发、状态读取和错误反馈
- 示例工程
- 按客户工具链和项目接口提供
- 联调边界
- 按控制周期、网络环境和验收要求确认
- 配套关系
- 可与开放协议和 yksw 上位机软件配合使用
配置与扩展
需要 SDK 或二次开发支持时,优先确认目标语言、运行系统、控制周期、数据格式和仿真 / 测试平台。若项目只需要轻量命令调用,可优先参考 开放通信协议。