项目背景
燕山大学的并联机构研究在国内具有传统优势。课题组的科研工作需要一套 能复现”基座扰动叠加上层精动”复合工况的实验设备,常规六自由度平台无法满足。
为什么是九自由度
刚体的运动学只有 6 个自由度,但复合机构的研究往往需要更高维度的运动空间:
- 研究上层平台在下层运动基座上的响应(3 自由度精动 on 6 自由度大行程)
- 复现飞行器在颠簸气流中机舱内乘员的体感(基座大姿态 + 内部小姿态叠加)
- 验证机器人末端工具的运动误差(基座漂移 + 关节微动)
九自由度运动平台正是为这类问题设计的。
系统构成
| 层级 | 自由度 | 配置 | 用途 |
|---|---|---|---|
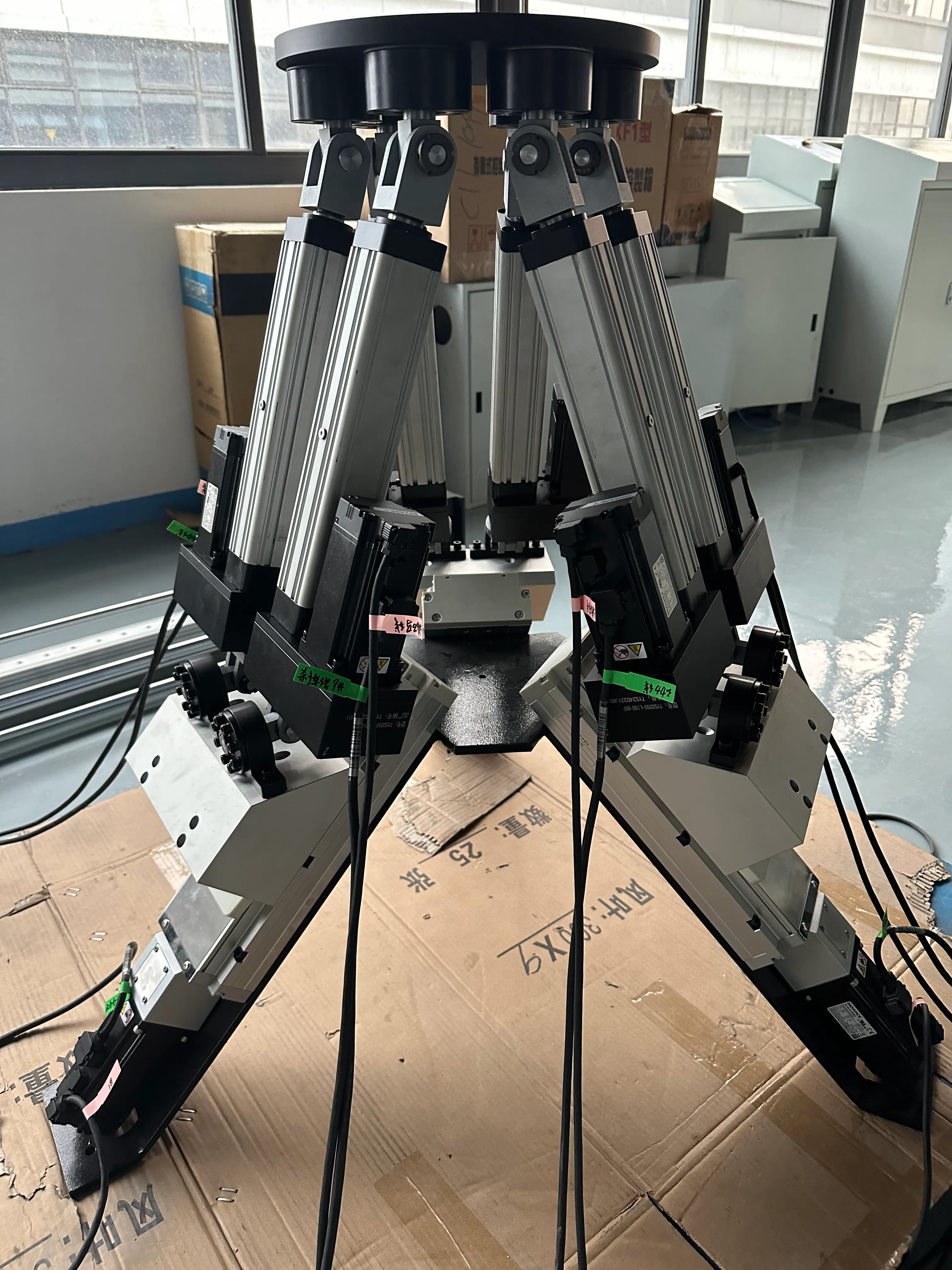
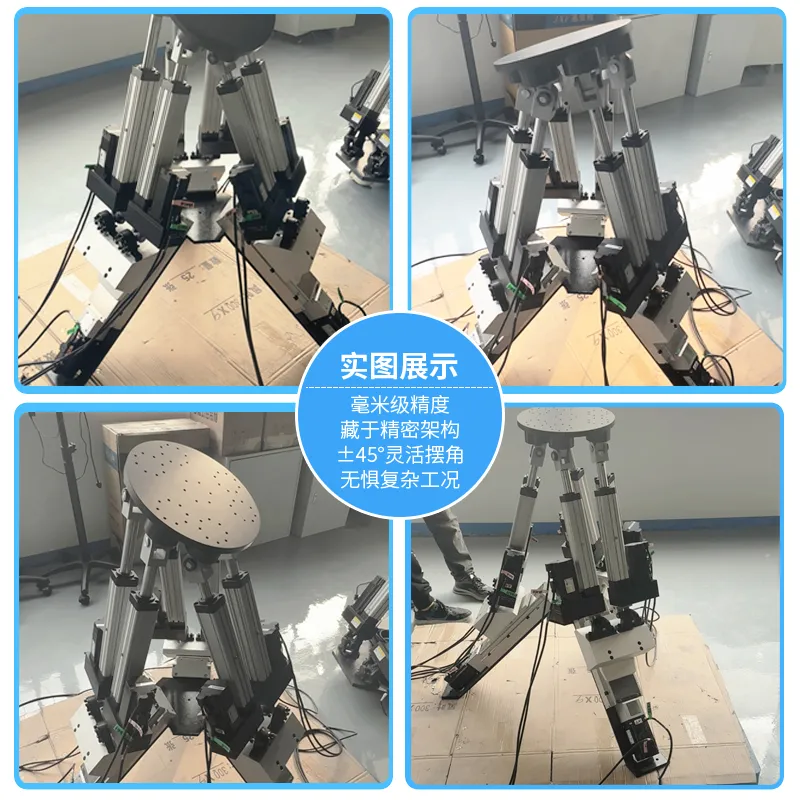
| 下层 | 6 DOF | 大行程六自由度平台 | 模拟基座扰动、大姿态变化 |
| 上层 | 3 DOF | 微米级 Hexapod 精动机构 | 模拟精密运动、小幅扰动 |
| 控制 | 统一调度 | 9 路同步输出 | 二者独立或联合控制 |
应用价值
- 学术研究: 多体动力学、并联机构控制算法的实验平台
- 工程应用: 仿真飞行器内部精密设备、舰艇舱内雷达稳定等复合场景
- 教学: 本科生 / 研究生并联机构课程实验装置